
产品简介
产品概述
四⾜机器狗是EASYTOLAB研发的⼀款⼩型四⾜机器⼈平台。该产品体型⼩巧、灵巧敏捷,专为科研教育与家庭陪伴场景设计。Q1 机器狗深度融合了视觉感知与强化学习运动控制算法,能够展现出极⾼的运动机能,并为开发者提供⾼度开放的软硬件接⼝,是机器⼈算法验证与底层技术研发的理想平台。
系统特点
- 极致运动性能: 具备全向运动控制能⼒,⽀持空翻、倒⽴等⾼难度动作,运动表现卓越。
- 前沿感知系统: 搭载视觉避障系统,能够精准感知外部环境并进⾏⾃主规避。
- ⾼度开放⽣态: 提供开放算法接⼝,⽅便科研⼈员与开发者进⾏算法的⼆次开发与调试。
- 极致成本控制: 依托全栈⾃研技术,极⼤降低了科研与应⽤部署的⻔槛。
- 快速原型开发:全⾯⽀持MATLAB/Simulink,提供快速原型(RCP)和硬件在环(HIL)开发,⽆需编写复杂底层代码,加速算法开发周期。
产品的控制链条
控制回路说明
- 感知层: 通过视觉系统实时获取外部环境图像数据,⽤于避障与导航。
- 决策与规划层: 依托内部算法算⼒,处理视觉信息,并基于强化学习进⾏运动步态的实时解算与规划。
- 执⾏层: 搭载8核⾼性能CPU,下发控制信号驱动12个⾃由度(DOF)的关节电机,输出所需扭矩完成复杂动作。
信号流向
视觉环境数据采集→视觉避障系统识别与处理→运动控制算法解算指令→8核⾼性能CPU下发控制信号→12个关节电机输出扭矩驱动→完成全向运动/⾼难度动作。
关键控制参数
- 控制⾃由度 (DOF): 12 ⾃由度
- 算⼒配置: 8核⾼性能CPU
- 峰值扭矩: 17 N.m
产品配置的详细数据
技术参数规格
| 参数 / 型号 | Q1 机器狗规格数据 |
|---|---|
| 整机重量 (带电池) | 约 12 kg |
| 站立尺寸 (L×W×H) | 58 × 30 × 35 cm |
| 折叠/趴下尺寸 | 65 × 30 × 15 cm |
| 最大速度 | 2 m/s |
| 续航时间 | 约 1 h |
| 有效载荷 | 3 kg |
| 最大攀爬落差 | 24 cm |
| 连续楼梯高度 | 16 cm |
| 最大攀爬斜坡 | 30° |
| 自由度 (DOF) | 12 |
| 算力配置 | 8 核高性能 CPU |
| 峰值扭矩 | 17 N·m |
相关用途与测试方向
- 科研教育: 凭借开放的算法接⼝,可作为⾼校与研究机构进⾏计算机视觉、强化学习运动控制的教学与实验平台。
- 家庭陪伴测试: 轻量化的机身与灵巧的运动能⼒,适合探索机器⼈在家庭室内环境下的交互与陪伴场景。
- 底层核⼼技术验证: ⽤于测试全向运动控制、⾼动态动作(如空翻、倒⽴)及视觉避障算法的稳定性。
 Details
Details球轮自平衡机器人 ETL-BOT-BTP
- #机器人
- @球轮自平衡机器人
EDU-BOT-BTP 是⼀款基于单球驱动的全向⾃平衡机器⼈(Ballbot)实验平台。
 Details
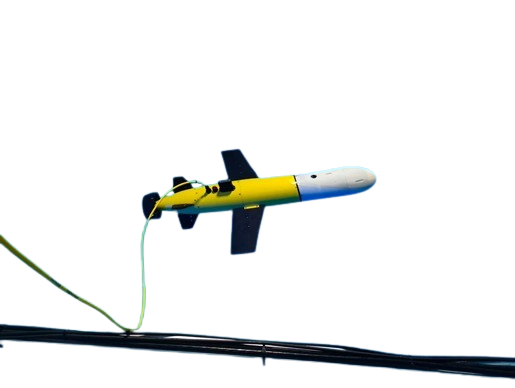
DetailsAUV⾃主航⾏器科研平台 ET-AUV-ATP
- #其他
ET-AUV-ATP 是⼀款专为⾼等院校与科研院所深度定制的 AUV(⾃主⽔下航⾏器)控制算法教学与科研实验平台。
 Details
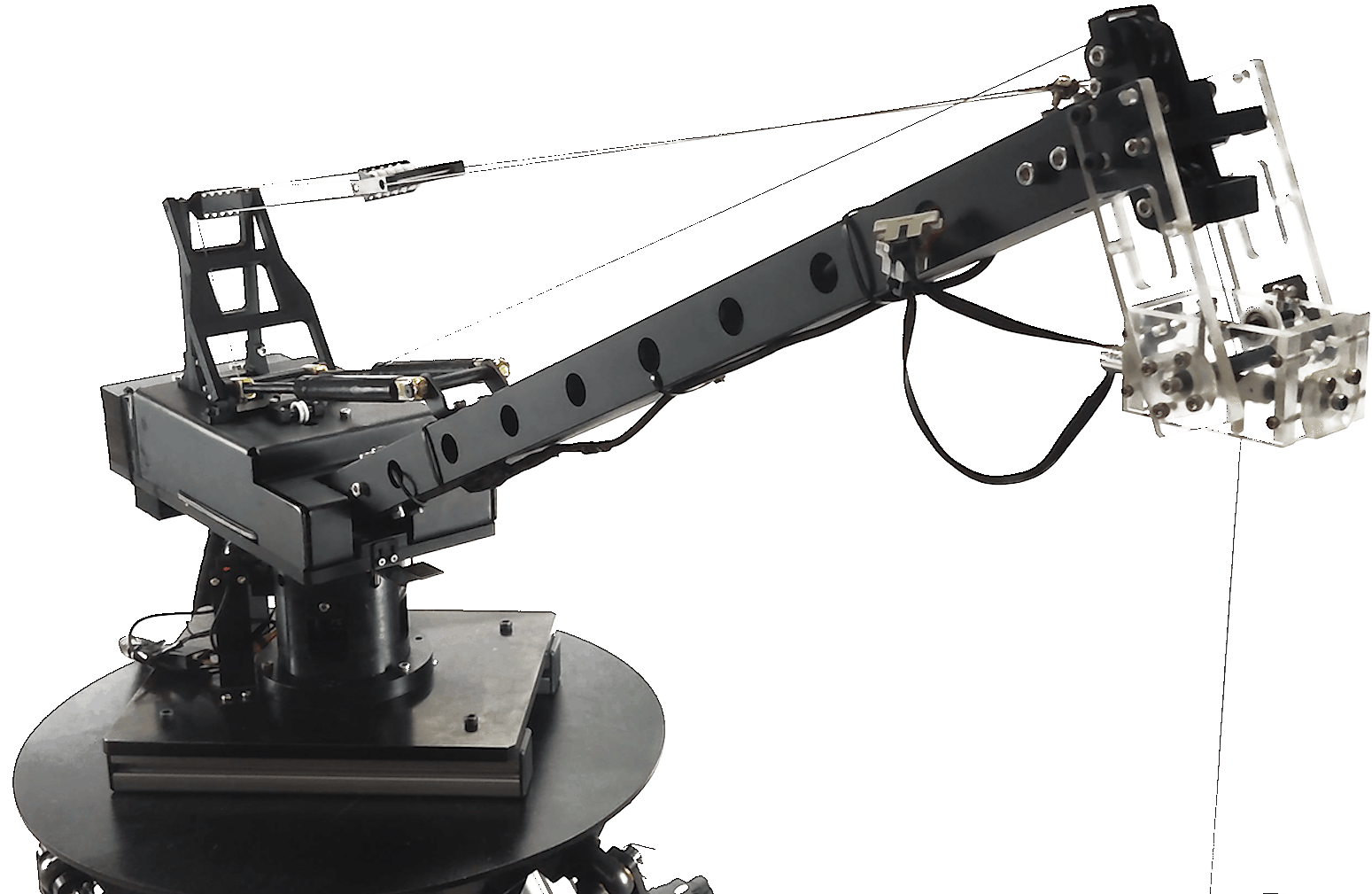
DetailsStewart 实验平台 ET-RA-ST-01
- #机器人
- @机械臂
船吊控制系统平台,结合高度复杂的海洋环境模拟,为精确货物搬运和动态负载控制提供了创新性和实际应用价值极高的研究工具。
 Details
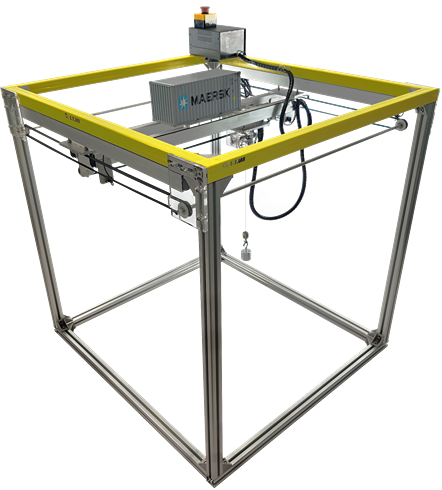
Details三自由度桥式起重机实验平台 ET-GC-FGC-03
- #自动控制/欠驱动
- @吊车
桥式吊车实验平台,通过模拟真实世界的起重搬运挑战,为研究和教育提供了一个精准控制负载摆动和动态定位的实用模型。
 Details
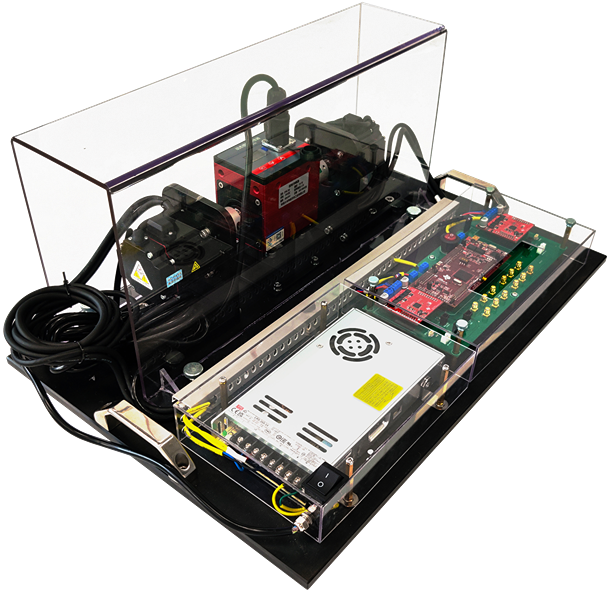
Details小型桌面电机加载平台系列 ET-MT-DML
- #电机与电气
- @电机
小型桌面电机加载平台提供完整的电机驱动系统,实现三相永磁同步电机 (或者感应电机步进电机等)的高效和高动态控制。
 Details
Details船吊控制系统平台 ET-GC-SCC
- #自动控制/欠驱动
- @吊车
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。