Categories.4
从热门分类开始
Products.8
精心挑选产品
 Details
Details三自由塔式吊车实验平台 ET-GC-FTC
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
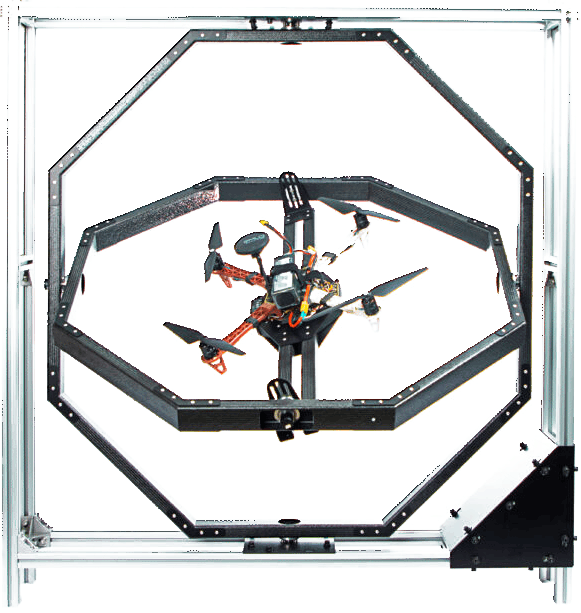
Details多旋翼无人机测试系统平台 ET-AIR-MTP
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。
 Details
Details多智能体机器人实验平台 ET-MA-MEP
- #机器人
- @多智能体
建立多智能体机器人协调系统,实现多个机器人的相互协调与合作。
 Details
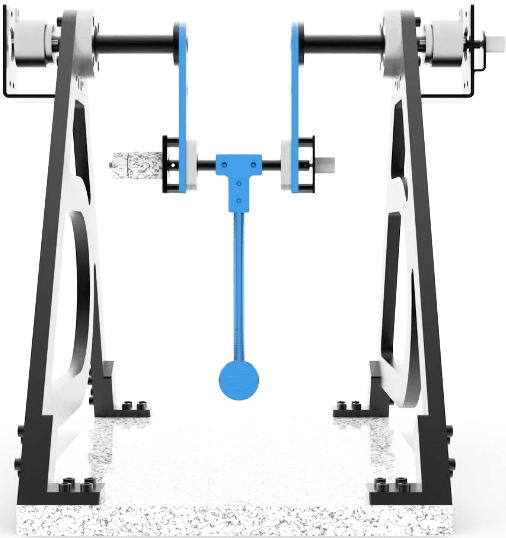
DetailsAcrobot ET-IP-AB
- #自动控制/欠驱动
- @倒立摆
体操机器人(Acrobot)是一种灵活的机械设计,模仿人体动作,具有出色的平衡和敏捷性,可用于执行各种复杂的体操动作。
 Details
DetailsPendubot ET-IP-PB
- #自动控制/欠驱动
- @倒立摆
Pendubot是一种摆式机器人,它通过一个或多个关节连接的方式来模拟摆动运动,它简单而直观的动作可以帮助人们理解控制理论和动力学概念。
 Details
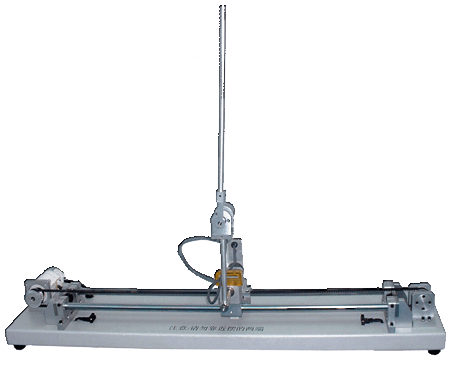
Details三级直线倒立摆 ET-IP-TLP-03
- #自动控制/欠驱动
- @倒立摆
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。
 Details
Details二级直线倒立摆 ET-IP-TLP-02
- #自动控制/欠驱动
- @倒立摆
二级直线倒立摆是一种控制理论中的经典系统,可用于研究控制理论中的稳定性、鲁棒性等性质。
 Details
Details小车倒立摆实验平台系列 ET-IP-CPE
- #自动控制/欠驱动
- @倒立摆
小车倒立摆实验的主要目的是通过控制一辆带有倒立摆的小车,使其能够在直立位置上保持平衡