产品简介
产品概述
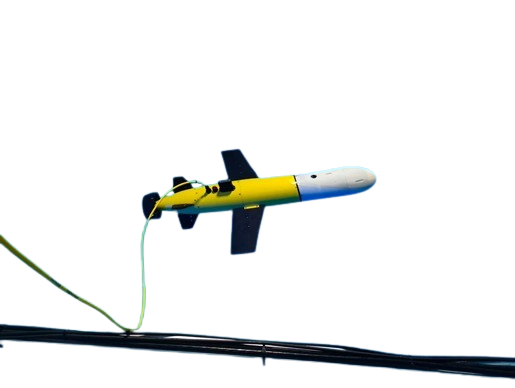
ET-AUV-ATP 是⼀款专为⾼等院校与科研院所深度定制的 AUV(⾃主⽔下航⾏器)控制算法教学与科研实验平台。该平台的核⼼价值在于彻底打通“仿真-实物” (Simulation-to-Reality) 的全链路开发流程,解决传统⽔下机器⼈研发中物理特性模拟不准、算法迁移困难的痛点。作为系统架构师,我们将该平台定义为:集流体⼒学验证、先进控制算法研究与⽔下分布式通信于⼀体的⾼阶实验载体。
系统特点
- 平台采⽤经典的⻥雷式流线型低阻⼒设计。
- ⽅案经过严密的流体⼒学特性优化,能够精准模拟真实海洋勘测设备在⽔下的滑⾏与巡航姿态。
- 机身结合⾼强度机加⼯部件,具备优异的结构刚性,⽀持在实验⽔池中进⾏多⾃由度的⾼动态运动控制。
核心优势
本平台在架构设计上实现了 MATLAB/Simulink 与 ROS/ROS2 双⽣态的深度互通,为开发者提供三个层⾯的技术⽀撑:
- 极速原型开发:研究者可直接在 MATLAB/Simulink 中构建 AUV 动⼒学模型,并针对多变量解耦、路径规划等核⼼挑战进⾏控制律设计。
- ⼀键代码⽣成与部署:利⽤⾃动代码⽣成技术,Simulink 设计的控制算法可直接编译并⽆缝嵌⼊板载 ROS/ROS2 分布式架构,跨越复杂的底层驱动开发。
- 1:1 ⾼保真⽆缝切换(数字孪⽣):通过 1:1 的数字孪⽣仿真环境,算法在虚拟⽔池验证后,⽆需修改任何底层代码逻辑即可⼀键部署⾄实物样机,实现“零成本”算法迁移。
适用专业
适⽤专业:⾃动化、船舶与海洋⼯程、控制科学与⼯程、⽔声⼯程、⼈⼯智能、机器⼈⼯程等。
- 应⽤场景:
- 课程建设:助⼒本科⽣《控制理论》、《⽔下机器⼈技术》等课程的实操实验。
- ⾼阶科研:⽀持研究⽣及学者进⾏ MPC、CBF、ADRC 等前沿控制算法的半实物验 证。
- 学科竞赛:为⽔下机器⼈⼤赛、⼈⼯智能创新⼤赛等提供标准化的硬件与算法底 座。
产品控制链条
控制回路说明
平台构建了逻辑严密的四层闭环架构,确保了从顶层决策到执⾏机构的⾼效协同:
- 输⼊层:MATLAB/Simulink 环境,⽀持快速原型(RCP)开发,覆盖从线性控制到深度强化学习的多种输⼊策略。
- 控制层:基于 ROS/ROS2 的分布式通信⻣⼲,负责核⼼指令调度与全局路径规划。
- 执⾏层:核⼼执⾏逻辑在于多变量解耦控制。系统实时调度主翼、尾舵与推进器的输出,模拟真实⽔下航⾏器的俯仰、偏航及定深巡航姿态。
- 反馈层:由⼯业级⾼精度 IMU 与深度传感器组成,⽀持百赫兹级状态捕获,形成⾼频感知闭环。
关键控制参数
| 配置项 | 规格/说明 |
|---|---|
| 状态捕获频率 | 百赫兹级(100Hz+)高频实时采集 |
| 通讯协议 | 标准 ROS2 接口 / 底层 RS485 链路协议 |
| 感知精度 | 姿态分辨率 ≤0.05°;高精度深度压强感知 |
| 控制算法支持 | PID、LQR、MPC、CBF、ADRC(自抗扰控制) |
| 解耦能力 | 支持推力、俯仰力矩、偏航力矩的多变量解耦 |
| 开发环境 | MATLAB/Simulink、ROS/ROS2、C++/Python |
产品配置的详细数据
核心配置清单
| 序号 | 配置项 | 规格/描述 |
|---|---|---|
| 1 | 机身主体 | 鱼雷状流线型结构,包含高效主翼、四叶尾舵及铝制外支架 |
| 2 | 惯性导航单元 | 工业级压力传感器,用于亚厘米级定深控制反馈 |
| 3 | 动力执行系统 | 无刷水下推进器、高扭矩舵机执行单元 |
| 4 | 多功能脐带缆 | 实验室专用,集成外部供电、物理安全牵引及高速数据双向传输 |
| 5 | 软件架构包 | Simulink 模型库、ROS2 底层驱动源码、数字孪生仿真包 |
技术参数规格
• 材质⼯艺:采⽤⾼品质机加⼯部件(铝合⾦/⼯程塑料),确保⽔下运⾏的物理刚性与抗压性。 • 接⼝开放性:硬件接⼝完全透明,软件协议全源码开放,⽀持⽤户进⾏⾃定义传感器扩展。 • 安全机制:内嵌倾⻆过限保护与电⼦围栏逻辑,配合⾼强度脐带缆,确保⽔池实验过程物理可控。
软硬件字模块说明
硬件系统
姿态感知模块:核⼼ IMU 以百赫兹级频率捕获 AUV 的姿态⻆、⻆速度及线性加速度,是实现⾼动态平衡与姿态解算的物理基础。动⼒与控制⾯:执⾏层通过精密解耦逻辑,协调控制主翼的升降与尾舵的偏转,结合推进器推⼒,实现对⽔下多⾃由度(DOF)运动的精准控制。安全保障系统(脐带缆):针对实验室⽔池环境优化,⾼速双向数据传输能⼒允许科研⼈员在地⾯⼯作站实时监控 AUV 内部状态(如电调参数、姿态残差),避免声学通信的延迟与丢包问题。
软件生态架构
- ⾃动化验证流:从 Simulink 中的数学建模出发,经过⾼保真 Gazebo 环境仿真,通过⼀键部署脚本进⼊实物运⾏,形成闭环验证链路。
- 零成本迁移路径:Simulink 控制模块与 ROS2 节点解耦设计,确保了算法在不同动⼒学模型间的快速迁移与重构。
面向科研的实验与开发方向
基础实验
- 动⼒学建模:AUV 运动学⽅程建⽴与⽔阻模型分析。
- 感知融合实验:基于 IMU 与深度计的数据融合(如 Kalman 滤波)与姿态解算。
- 闭环控制基础:基于 PID 的定深、定向与定速控制实验。
进阶实验
- 多约束主动避障:融合 MPC(模型预测控制) 与 CBF(控制屏障函数) 算法,在机身倾⻆受限、推⼒饱和等边界条件下,实现针对移动圆柱障碍物与椭圆形动态障碍物的零碰撞最优路径规划。
- 多变量解耦与预测控制:针对复杂动态⽔流环境,验证上层算法在轨迹交错情况下的前瞻预测能⼒。
- ⼲扰观测与补偿:利⽤ ESO(扩张状态观测器) 进⾏未知外部⼲扰(如⽔流涌动)的在线估计,并结合 ADRC(⾃抗扰控制) 提升系统鲁棒性。
- 前沿技术拓展:⽀持⽔下视觉⽬标跟踪、分布式集群通信及强化学习⾃适应控制研究。
创新实验
- 变约束环境下的动态运动: 利⽤强化学习开发机器⼈在跨越障碍、⾮连续⽀撑⾯上的⾃主⾏⾛能⼒。
- 端到端 (End-to-End) 神经控制研究: 探索视觉输⼊直接映射⾄关节⼒矩指令的深度学习模型。
- Sim-to-Real 跨域迁移鲁棒性测试: 研究对抗性⼲扰及系统参数随机化对模型迁移效率的影响。
安全免责声明与⼆次开发协议
硬件耦合⻛险警示
本软件⽣成的控制策略最终将在物理执⾏层执⾏。物理世界中硬件执⾏指令所产⽣的⼀切后果(包括但不限于机械碰撞、过热损坏)均由操作者⾃⾏承担。 软件仅作为辅助实验⼯具,实际操作控制权与安全监测责任由⽤户完全负责。
⼆次开发责任限制
⽤户在进⾏任何适配、修改或⼆次开发时,必须明确知晓并承担以下⻛险:
- ⼈身伤害与财产损失: 机器⼈运⾏失控可能导致的物理性损伤。
- 执⾏器硬件损坏: 由于错误的 PID 参数、限位配置或⼒矩过载导致的电机损毁。
- 安全测试缺失事故: 在未经充分仿真验证的情况下直接在实机上部署算法导致的意外失控。
 Details
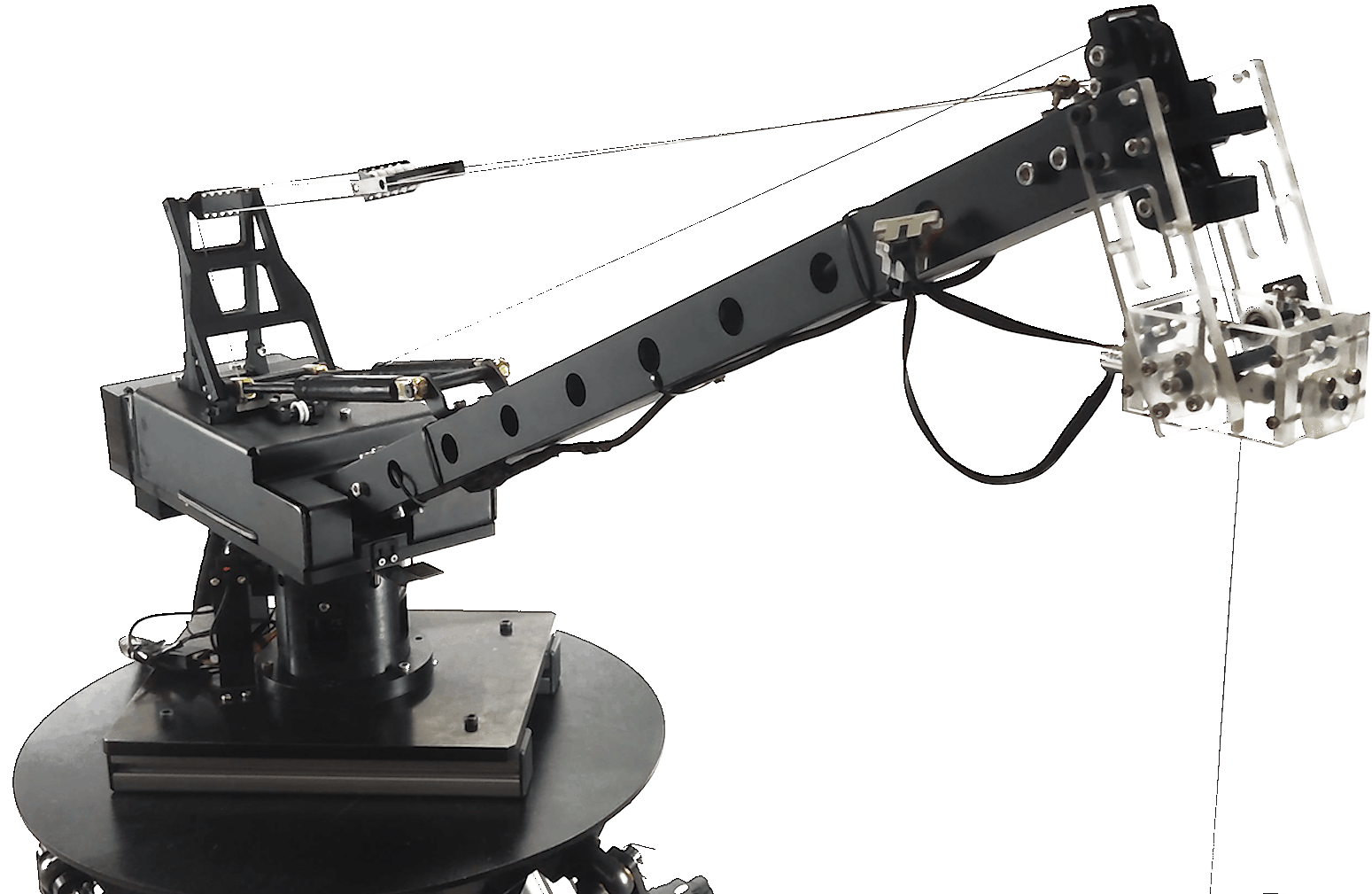
DetailsStewart 实验平台 ET-RA-ST-01
- #机器人
- @机械臂
船吊控制系统平台,结合高度复杂的海洋环境模拟,为精确货物搬运和动态负载控制提供了创新性和实际应用价值极高的研究工具。
 Details
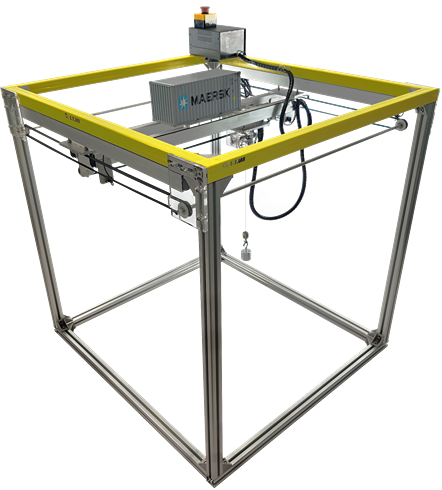
Details三自由度桥式起重机实验平台 ET-GC-FGC-03
- #自动控制/欠驱动
- @吊车
桥式吊车实验平台,通过模拟真实世界的起重搬运挑战,为研究和教育提供了一个精准控制负载摆动和动态定位的实用模型。
 Details
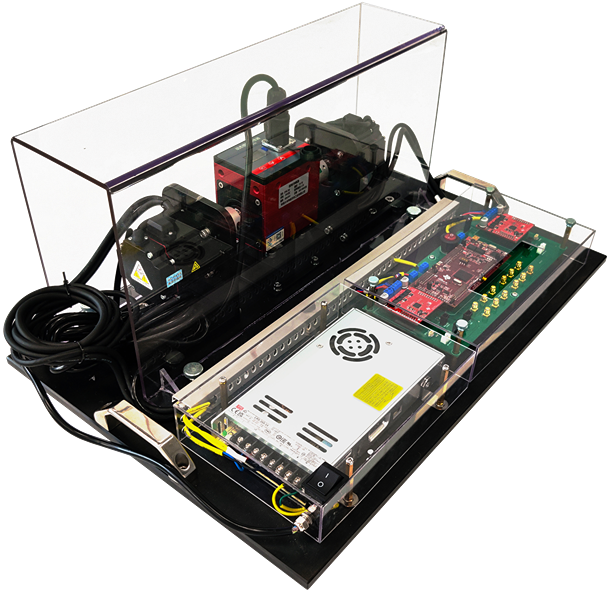
Details小型桌面电机加载平台系列 ET-MT-DML
- #电机与电气
- @电机
小型桌面电机加载平台提供完整的电机驱动系统,实现三相永磁同步电机 (或者感应电机步进电机等)的高效和高动态控制。
 Details
Details船吊控制系统平台 ET-GC-SCC
- #自动控制/欠驱动
- @吊车
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。
 Details
Details三自由塔式吊车实验平台 ET-GC-FTC
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
Details多旋翼无人机测试系统平台 ET-AIR-MTP
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。