三级直线倒立摆
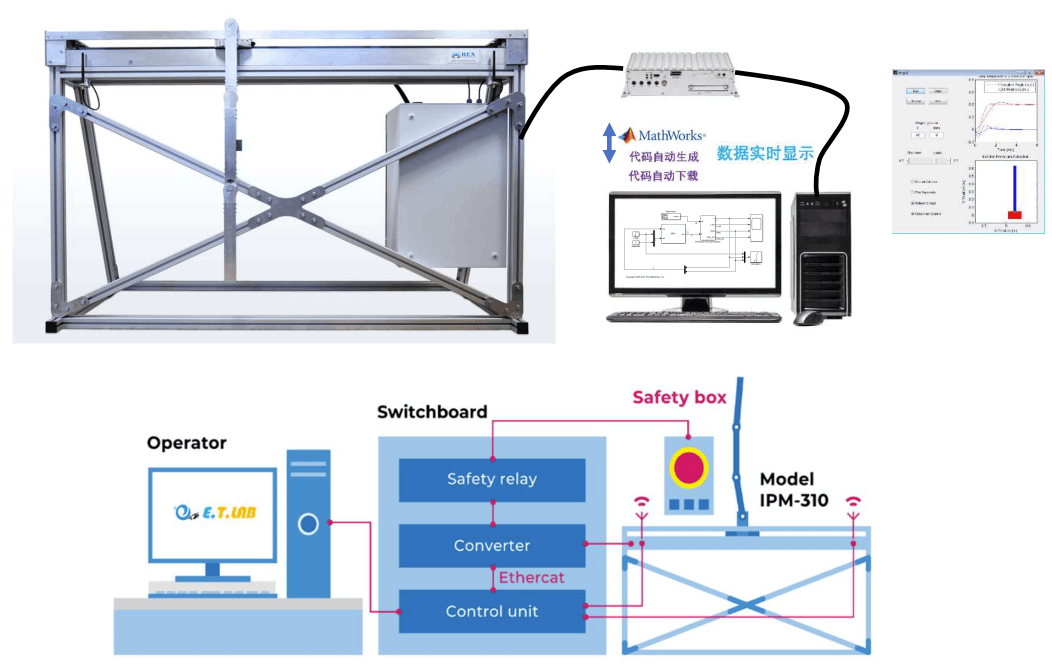
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。
#自动控制/欠驱动 @倒立摆联系我们产品概述
三级倒立摆(Triple Inverted Pendulum)系统是典型的欠驱动系统,拥有三个自由度,却通常仅靠一个伺服电机来维持整个系统的稳定。它由三个杆和旋转轴组合而成,模拟出具有复杂动力学和稳定性问题的系统,在控制理论、机器人控制、非线性控制算法等研究领域应用广泛。
由于系统的欠驱动特性,无法单纯依靠控制输入直接掌控每个自由度的运动,必须借助精确的反馈控制算法来实现倒立摆的平衡与稳定。该平台适用于研究和应用PID控制、LQR控制、模糊控制、强化学习等多种控制策略。
适用平台:
- MATLAB/Simulink:可用于控制算法设计、仿真以及实时运行。
- LabVIEW:主要用于实验和控制系统的数据采集与处理。
- Windows/Linux操作系统:支持多平台应用,方便不同用户选择合适的系统进行开发。
- Python/C++:用于开发自定义控制算法,满足个性化需求。
- ROS:适用于机器人的控制和仿真,助力机器人相关研究。
产品特点
高精度控制
- 欠驱动系统:利用单个伺服电机控制系统运动,是研究欠驱动系统控制算法的理想选择。
- 实时反馈与调整:通过位置、速度、角度反馈控制,确保系统在动态过程中能快速调整,维持稳定。
- 多种控制方法:支持PID控制、LQR控制、模糊控制、自适应控制、强化学习控制等多种算法,满足不同研究需求。
开放式控制接口
- 多环境支持:支持MATLAB/Simulink、LabVIEW、ROS等开发环境,实现实验平台与控制算法的无缝连接。
- 高精度数据采集:配备高分辨率光学编码器和高精度传感器,实时采集电机转速、位置、姿态数据,保障系统精度。
- 远程控制:具备远程控制接口,支持通过上位机软件或移动APP控制系统,满足不同控制和测试场景需求。
强大的实验功能
- 单轴控制模式:通过单个伺服电机控制一个自由度,便于实验室开展欠驱动系统的控制研究。
- 同步控制:可研究如何利用有限的控制输入使系统稳定并达到预期轨迹。
- 多种控制模式:涵盖位置环控制、速度环控制、力矩环控制,适应各类实验要求。
适用场景
控制系统实验与教学
- 教育应用:适用于大学和研究机构的控制理论课程,通过倒立摆控制实验,帮助学生掌握欠驱动系统控制、PID调节、模糊控制、智能控制等理论与实践知识。
- 自动化控制:用于测试和验证自动控制算法,包括机器人关节控制、路径规划与反馈控制等方面。
非线性系统分析
- 动力学分析:用于非线性动力学分析,研究柔性结构的控制与稳定性问题。
- 振动控制:在复杂机械系统中,可分析系统的柔性效应和谐波响应,为振动控制提供参考。
强化学习与智能控制
- 算法测试:作为强化学习和深度学习算法的测试平台,研究自适应控制策略和机器人智能化控制。
- AI算法优化:用于优化控制策略,提升机器人自主学习与决策能力。
参数规格
| 功能 | 规格 |
|---|---|
| 控制自由度 | 3自由度(单伺服电机控制系统) |
| 最大角度 | ±90°每个关节 |
| 伺服电机 | DC伺服电机,最大输出扭矩10Nm |
| 编码器分辨率 | 0.001°(高精度位置反馈) |
| 最大负载 | 2kg(适用于轻量负载应用) |
| 系统响应时间 | 低于50ms |
| 采样频率 | 1kHz(实时控制反馈) |
| 最大控制频率 | 10kHz |
| 电源要求 | 24V DC电源(350W) |
| 接口类型 | CAN、RS232、无线通信 |
| 适用软件 | MATLAB/Simulink、LabVIEW、Python、C++ |
| 额外配件 | 可调弹簧(用于模拟不同刚度的柔性关节) |
| 设备尺寸 | 2000mm x 250mm x 1120mm |
相关课程
控制系统与倒立摆
- 倒立摆建模与控制:研究倒立摆系统的动力学建模、状态空间表示,以及运用状态反馈控制、PID控制等方法实现系统稳定性。
- 倒立摆的最优控制:设计和实现倒立摆系统的最优控制策略,如线性二次型最优控制(LQR),提升系统响应速度和稳定性。
- 倒立摆的模型预测控制(MPC):应用模型预测控制方法,处理倒立摆系统的约束和多变量控制问题,实现精确轨迹跟踪和稳定性控制。
- 倒立摆的强化学习控制:利用强化学习算法,研究倒立摆系统的自适应控制策略,探索无需精确模型的控制方法。
- 倒立摆的机器人应用:探讨倒立摆控制技术在机器人领域的应用,如自平衡机器人、仿人机器人等,研究其在实际环境中的控制策略和实现方法。
自动控制
- PID控制:学习PID控制算法在实际系统中的应用与调试技巧。
- 模糊控制与自适应控制:研究模糊控制系统和自适应控制算法。
- 非线性系统分析:探讨倒立摆系统在非线性控制中的应用与面临的挑战。
MATLAB/Simulink课程
- 基于Simulink的动力学仿真:学习使用Simulink进行动力学仿真。
- Simulink伺服系统建模:掌握在Simulink中进行伺服系统建模的方法。
- Simulink代码自动生成与硬件部署:学会利用Simulink自动生成控制代码并部署到硬件上。
 Details
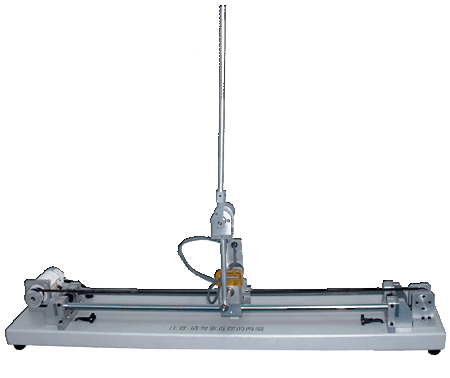
Details二级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
二级直线倒立摆是一种控制理论中的经典系统,可用于研究控制理论中的稳定性、鲁棒性等性质。
 Details
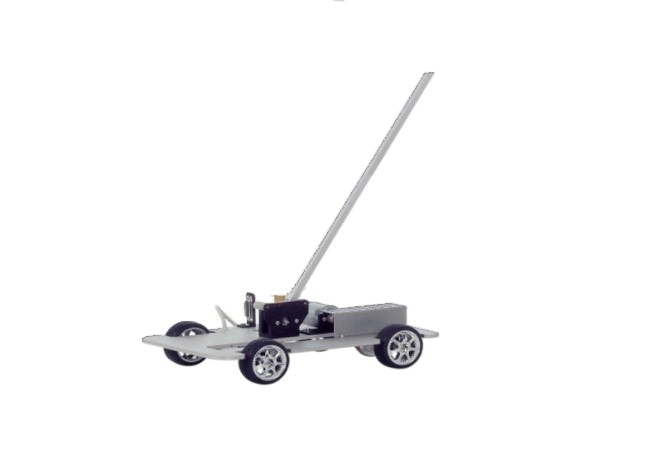
Details小车倒立摆实验平台系列
- #自动控制/欠驱动
- @倒立摆
小车倒立摆实验的主要目的是通过控制一辆带有倒立摆的小车,使其能够在直立位置上保持平衡
 Details
DetailsBuck 电路实验平台
- #电机与电气
- @电机
Buck 电路实验平台是一款专为学习数字电源控制基础知识设计的实验设备。该平台支持多种经典控制算法,学生借助 Matlab 等软件,能设计和实验不同控制算法,观察参数变化对系统性能的影响,从而深入理解控制理论。
 Details
DetailsSCARA 机械臂实验平台
- #机器人
- @机械臂
SCARA 机械臂实验平台是一款专为高等院校和研究机构的教学与科研工作设计的实验设备,它将先进技术与实用功能相结合,在多个领域发挥着重要作用。控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
Details地空协同实验平台
- #机器人
- @多智能体
地空协同实验平台,集成了先进的动作捕捉技术、无人车自主驾驶技术和无人机飞行控制技术,旨在为科研人员、工程师和教育工作者提供一个全面且高效的实验环境,用于研究和开发地空协同控制算法、验证系统性能以及探索多智能体交互的新应用场景。
 Details
Details多电机加载实验平台
- #电机与电气
- @DSP与嵌入式系统
多电机加载实验平台,能够同时控制多种类型的电机,包括直流电机、直流无刷电机、步进电机以及舵机等,为用户提供了一个多功能的实验 环境。