产品概述
塔式吊车是一种具有复杂欠驱动特性的机电装备,广泛应用于现代建筑施工工地。它的动力学模型本质上是高度非线性的,驱动器远离有效载荷,使系统内机构运动不同步。由此导致负载摆动幅度大,定位精度不高,抗干扰能力差甚至增加安全隐患的问题。几十年来如何设计合适的控制器减少有效载荷的摆动以提高塔式起重机工作效率、精确定位和安全生产一直是国内外学者们重要的研究课题。
三自由塔式吊车实验平台是依据现代结构的塔式起重机设计的。三自由塔式吊车系统是一个高度非线性多入多出系统,配备了独特的2D角度测量传感器。该平台包括一个前臂和一个平衡臂,两个都是安装在一个在回转支撑轴承位置上的转盘上。平衡臂携带了一个平衡重物,前臂通过一个电动滑块挂载起重物。
Simulink/LabView软件系统可实现实时控制算法的快速原型验证。不需要编写C代码,及复杂的编译过程。三自由塔式吊车实验平台随基本控制器库一起提供。该模型由三个电动机控制系统和七个位置编码器测量系统组成。上位机系统实时显示了吊车位置和摆角。在MATLAB/Simulink从下拉菜单中选择的“实时工作”和“构建模型”项执行RTW例程。实验结果将通过可执行文件连接到Windows Target之后,获得了一个作为实时控制器运行的可执行文件。真正实现仿真即实验的目的。

适用平台:
- 本地 PC(Windows / Mac OS)
适用软件:
- 可执行二进制文件和图形用户界面
- LabVIEW驱动程序、实时、FPGA(可选)
- Matlab / Simulink驱动程序
- 外部控制API(ROS、Matlab、Python示例)
注:
不同的控制器可能需要不同的控制算法。
产品特点
- 非线性多输入多输出系统该系统采用独特的 2D 角度测量传感器,模拟了塔式吊车的欠驱动特性,提供了实时数据反馈和精准的负载控制
- 直观的实时控制:借助 Simulink/LabView 软件,TC-05 实验平台允许快速测试和验证控制算法,实现仿真与实验的无缝对接
- 高度集成的硬件系统:配备三台高精度直流电动机,增量式编码器,实时显示吊车位置和摆角,确保实验数据的准确性
- 尺寸可定制:标准尺寸为 1200x1200x1500 毫米,可根据研究和教学需求进行定制
适用场景
- 教育实验室:作为教育工具,帮助学生理解和研究复杂的塔式起重机动力学和控制理论
- 研究项目:为研究人员提供一个可靠的平台来测试新的控制策略,减少负载摆动,提高工作效率和安全性
参数规格
| 参数名称 | 参数值 |
|---|---|
| 设备质量 | 36 Kg |
| 塔的高度(从底板到顶部) | 1500 mm |
| 塔底尺寸长x宽x高 | 1200x1200x1500毫米 |
| 臂架长度(水平部分) | 1200 mm |
| 台车轨道可用长度 | 700mm |
| 小车丝杠螺距 | 1.22 cm/rev |
| 编码器计数分辨率(正交) | 4096 counts/rev |
| 有效塔角分辨率 | 2.197 x 10-4 Deg |
| 有效小车直线位置分辨率 | 5.88 x 10-7 M |
| 有效载荷线性位置分辨率 | 4.83 x 10-7 M |
| 有效载荷框架偏转角度分辨率 | 0.02197 Deg |
| 塔角范围(近似) | ±166.0 Deg |
| 电机 | TOWER TROLLEY PAYLOAD |
| 阻力 | 7.5 3.9 5.5 Ω |
| 扭矩恒定电流 | 0.52 0.056 0.056 N.m/A |
| 输出功率 | 120 30 30W |
| 最大连续电流 | 1.21 0.83 0.83 A |
| 电机减速比 | 100 50 50 |
| 电机负载到滑轮比 | 2 |
相关课程
针对TC-05三自由塔式吊车实验平台,以下是一些建议的相关课程,这些建议旨在通过结合理论学习与实际操作,加深学生对于控制系统、机械工程以及自动化技术的理解:
控制理论与应用
课程内容:基础的控制理论,包括PID控制、现代控制理论(如状态空间方法)、以及模糊控制等。
实验应用:利用TC-05平台进行控制算法的设计与实现,包括PID参数的调整以及更先进控制策略的测试。
机械系统动力学
课程内容:机械系统的动力学分析,重点是理解系统运动的基本原理和数学建模。
实验应用:通过TC-05平台模拟塔式吊车的动力学行为,分析和控制吊车负载的摆动。
自动化与机器人技术
课程内容:自动化系统的设计原理,包括机器人技术、传感器与执行器技术等。
实验应用:使用TC-05平台,理解自动化系统中的传感器和执行器如何协同工作,实现负载的精确搬运。
工程软件应用(MATLAB/Simulink)
课程内容:MATLAB和Simulink在工程问题中的应用,特别是在控制系统的建模和仿真方面。
实验应用:通过TC-05平台与MATLAB/Simulink的结合使用,开发和验证吊车控制算法。
工业控制系统
课程内容:介绍工业环境下的控制系统设计、实现与维护,重点是系统的可靠性与安全性。
实验应用:借助TC-05平台,展示工业控制系统中的常见问题和解决策略,如干扰抑制和容错控制。
项目基础课程
课程内容:团队合作完成的项目设计与管理,强调跨学科的沟通与协作。
实验应用:作为课程项目,学生团队可以利用TC-05平台设计一个完整的控制系统项目,从需求分析到系统实现和测试。
 Details
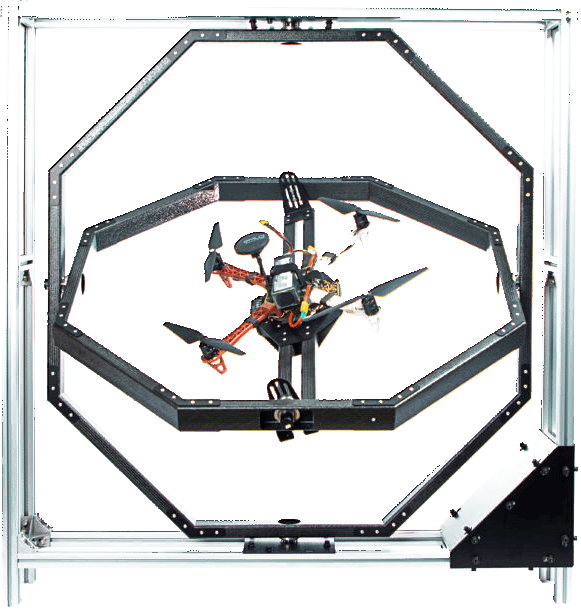
Details多旋翼无人机测试系统平台MQP-02
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。
 Details
Details多智能体机器人实验平台
- #机器人
- @多智能体
建立多智能体机器人协调系统,实现多个机器人的相互协调与合作。
 Details
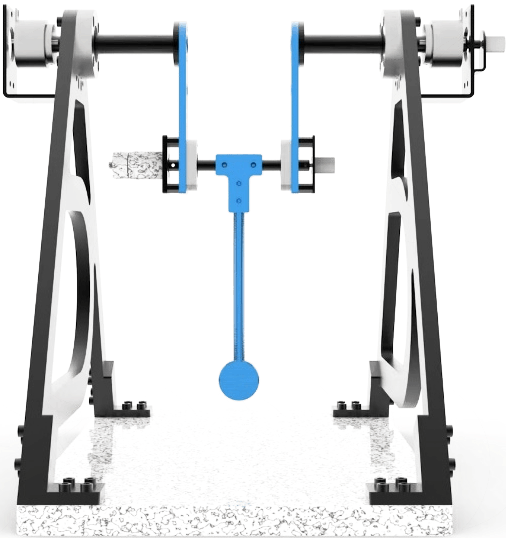
DetailsAcrobot
- #自动控制/欠驱动
- @倒立摆
体操机器人(Acrobot)是一种灵活的机械设计,模仿人体动作,具有出色的平衡和敏捷性,可用于执行各种复杂的体操动作。
 Details
DetailsPendubot
- #自动控制/欠驱动
- @倒立摆
Pendubot是一种摆式机器人,它通过一个或多个关节连接的方式来模拟摆动运动,它简单而直观的动作可以帮助人们理解控制理论和动力学概念。
 Details
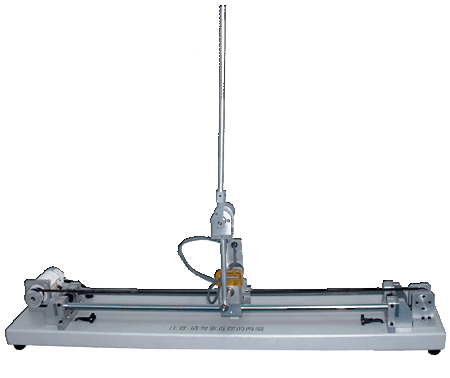
Details三级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。
 Details
Details二级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
二级直线倒立摆是一种控制理论中的经典系统,可用于研究控制理论中的稳定性、鲁棒性等性质。