产品概述
船用吊车一般指负载吊运过程位于海面之上,主要用于舰船间货物的运输转移等。与陆地吊车等类似,海上吊车在运输过程中,需要解决由于意外碰撞等引起的负载摆动的抑制问题。此外,由于吊车安装于船体之上,而船体本身受到海浪、海流的影响会产生多个自由度的平动与转动,进而严重影响负载的运输与定位,因此,在控制过程中必须对船身的运动进行有效补偿。船体运动导致的负载扰动通常远大于意外碰撞的影响,且导致整个系统工作在非惯性系,给控制方法设计及分析带来了巨大挑战。
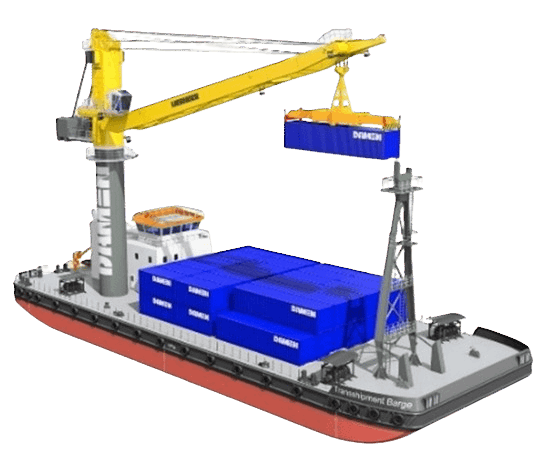
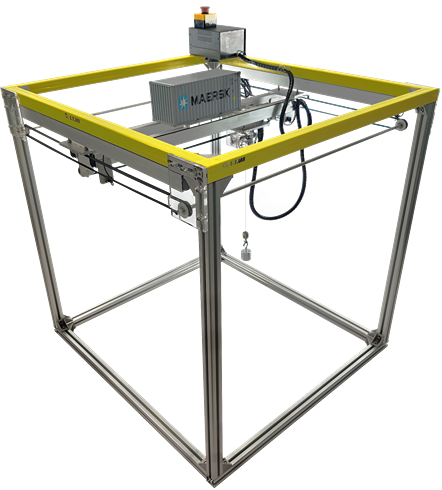
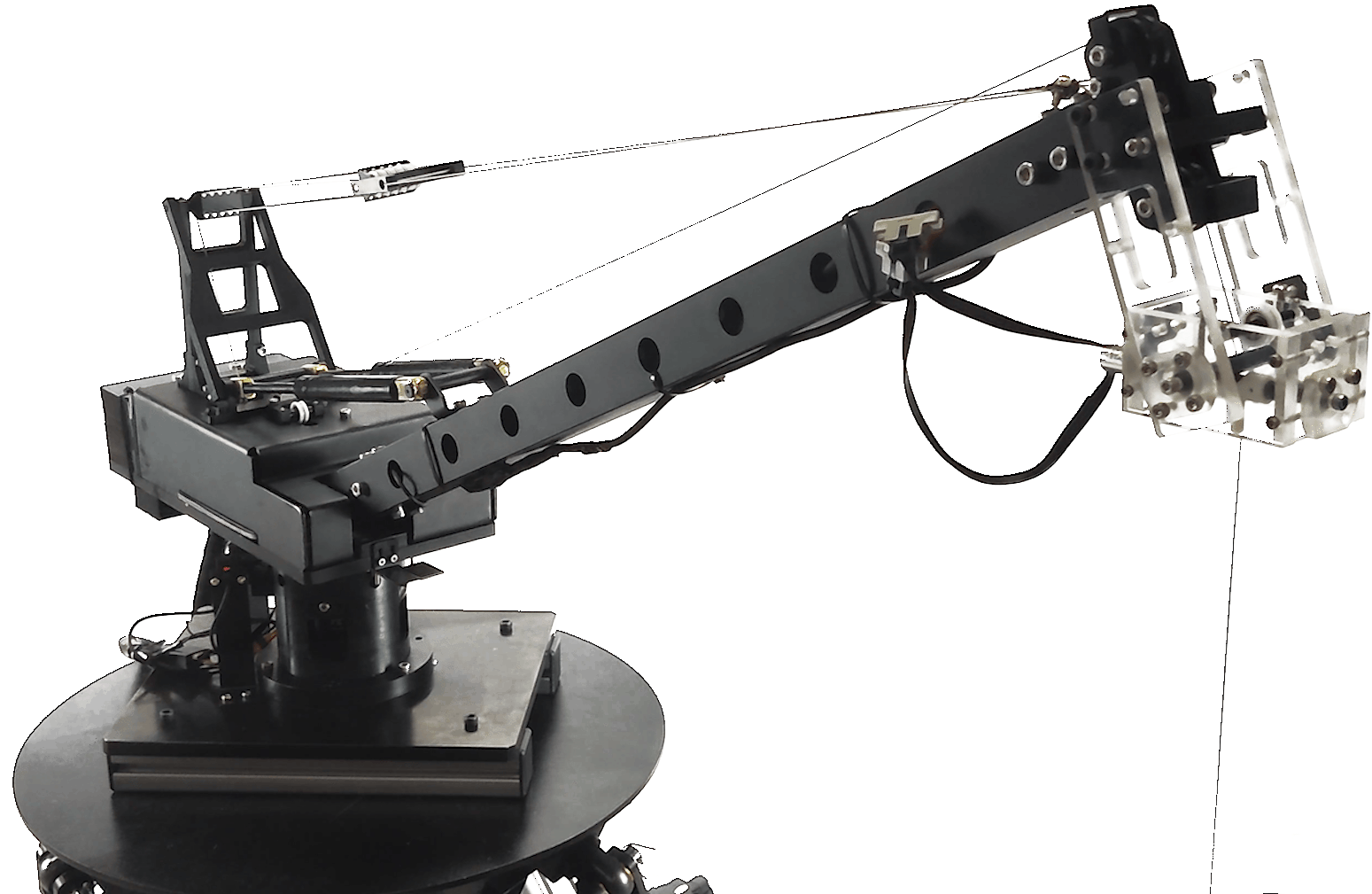
船吊控制系统平台由主吊车系统和Stewart六自由度风浪模拟器两部分组成。吊车系统都安装在转盘上,回转轴承和回转机械位于该转盘上。副臂带有配重,副臂悬吊了推车上的货物。该系统与MATLAB / Simulink完全集成,并且可以实时运行。包括许多预编程的控制实验。它们构成了构建用户自己的新算法的适当基础。实时控制算法的快速原型设计变得很容易(不需要编写C代码)。有三个控制驱动器(配有齿轮的直流电动机)和五个角位置传感器(编码器)。副臂在第一个强大的驱动器的驱动下旋转。副臂导轨上的手推车具有可调的间隙,并通过传动带和第二个驱动器来回推动。提升负载由第三驱动器操作。典型的控制目标是跟踪所需的三维轨迹(即以规定的方式操作负载),并同时将负载保持在最小的摆动幅度上。
适用平台:
- 本地 PC(Windows / Mac OS)
适用软件:
- 可执行二进制文件和图形用户界面
- LabVIEW驱动程序、实时、FPGA(可选)
- Matlab / Simulink驱动程序
- 外部控制API(ROS、Matlab、Python示例)
注:
不同的控制器可能需要不同的控制算法。
产品特点
- 集成开发环境:全面支持 MATLAB®/Simulink®,提供快速原型(RCP)和硬件在环(HIL)开发,无需编写C代码,便捷实现实时控制算法原型设计
- 高级机械设计:包含主吊车系统和Stewart六自由度风浪模拟器,配备高精度编码器,确保细致准确的运动控制
- 实验与教育并重:附带多个预编程控制实验,适合教育和研究用途,为构建和测试新算法提供了良好基础
- 优化的控制目标:旨在实现三维轨迹的精准跟踪以及负载的稳定搬运,最大程度减少摆动
- 高性能驱动器和传感器:三个控制驱动器和五个角位置传感器,确保了控制精度和响应速度
- 全方位安全保护:设备配有漏电保护和护罩保护,确保使用过程的安全
- 适应多变环境:吊车系统适应多自由度的平动与转动补偿,以及环境扰动,如海流和风浪的影响
- 精准的运动模拟:六自由度风浪模拟器能有效模拟海上风浪,为海洋工程研究提供了理想工具
参数规格
| 参数名称 | 参数值 |
|---|---|
| 质量 | 35 kg |
| 塔的高度(从底板到顶部) | 860mm |
| 塔底尺寸长 x 宽 x 高 | (1100-1600)x 1050 x 860 mm |
| 臂架长度(水平部分) | 1100-1500 mm |
| 编码器计数分辨率(正交) | 4096 counts/rev |
| 有效塔角分辨率 | 2.197 x 10-4 Deg |
| 有效载荷框架偏转角度分辨率 | 0.02197 Deg |
| 塔角范围(近似) | ±166.0 Deg |
| 电机 | TOWER TROLLEY PAYLOAD |
| 阻力 | 7.5 7.5 7.5 Ω |
| 扭矩恒定电流 | 0.52 0.52 0.52 N.m/A |
| 输出功率 | 120 120 120W |
| 最大连续电流 | 1.21 1.21 1.21 A |
| 电机减速比 | 100 100 100 |
| 电机负载到滑轮比 | 2 |
相关课程
针对ET-SC-06船吊控制系统平台,可以结合以下相关课程,旨在通过实践操作加深学生对海洋工程、控制系统、以及自动化技术的理解和应用能力:
海洋工程导论
课程内容:介绍海洋工程的基本概念、设计原理、以及在海洋环境中遇到的独特挑战。
实验应用:利用ET-SC-06平台模拟海上风浪对船用吊车操作的影响,理解如何设计控制系统以适应海洋环境。
控制系统设计
课程内容:深入探讨控制系统的设计、分析和实现,包括PID控制、自适应控制和鲁棒控制等。
实验应用:使用ET-SC-06平台开展控制算法的设计和测试,特别是在模拟海上复杂环境下的负载控制。
系统建模与仿真
课程内容:教授如何使用MATLAB/Simulink进行系统建模与仿真,以预测和分析系统行为。
实验应用:结合ET-SC-06平台,进行船吊控制系统的建模与仿真,验证控制策略的有效性。
自动化技术
课程内容:涵盖自动化系统的设计与实现,强调传感器、执行器和控制器的集成应用。
实验应用:通过ET-SC-06平台实现货物自动搬运任务,体验从传感器数据采集到控制执行的全过程。
机器人技术与应用
课程内容:探讨现代机器人系统的设计、操作及其在自动化和智能制造中的应用。
实验应用:利用ET-SC-06平台学习机器人控制技术在复杂环境下的应用,例如在模拟海上条件下进行精确的货物搬运。
工程项目管理
课程内容:介绍项目管理的基本原则和实践,包括项目规划、执行、监控和收尾。
实验应用:团队合作使用ET-SC-06平台设计和实施一个完整的船吊控制系统项目,从需求分析到最终实施。
可选附件*
超声定位模块(Matlab版本)(误差<=-/+2cm)

运动相机视觉定位系统(Matlab版本)(误差<=-/+1cm)

红外运动捕捉系统(Matlab版本)(误差<-/+0.1cm)

激光雷达系统(避障/定位)(Matlab版本)
视觉避障单元(Matlab版本)

超声避障

IMU单元摆角测量 (Matlab版本)
 Details
Details三自由度桥式起重机实验平台OHC-02
- #自动控制/欠驱动
- @吊车
桥式吊车实验平台,通过模拟真实世界的起重搬运挑战,为研究和教育提供了一个精准控制负载摆动和动态定位的实用模型。
 Details
Details小型桌面电机加载平台系列MR-02
- #电机与电气
- @电机
小型桌面电机加载平台提供完整的电机驱动系统,实现三相永磁同步电机 (或者感应电机步进电机等)的高效和高动态控制。
 Details
Details船吊控制系统平台 ET-SC-06
- #自动控制/欠驱动
- @吊车
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。
 Details
Details三自由塔式吊车实验平台TC-05
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
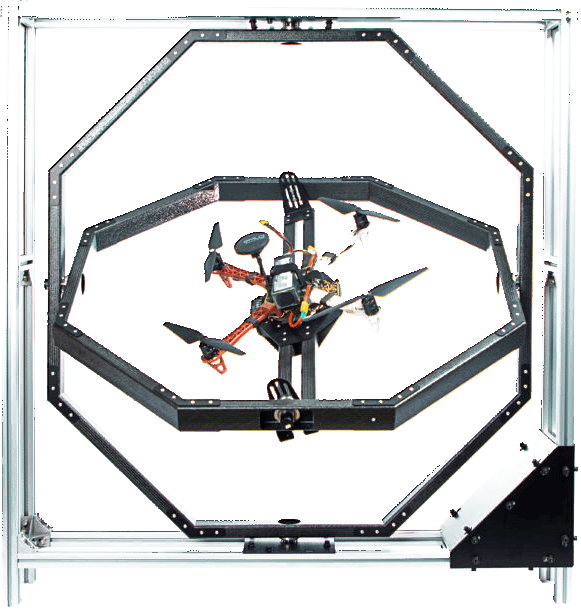
Details多旋翼无人机测试系统平台MQP-02
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。
 Details
Details多智能体机器人实验平台
- #机器人
- @多智能体
建立多智能体机器人协调系统,实现多个机器人的相互协调与合作。