产品概述
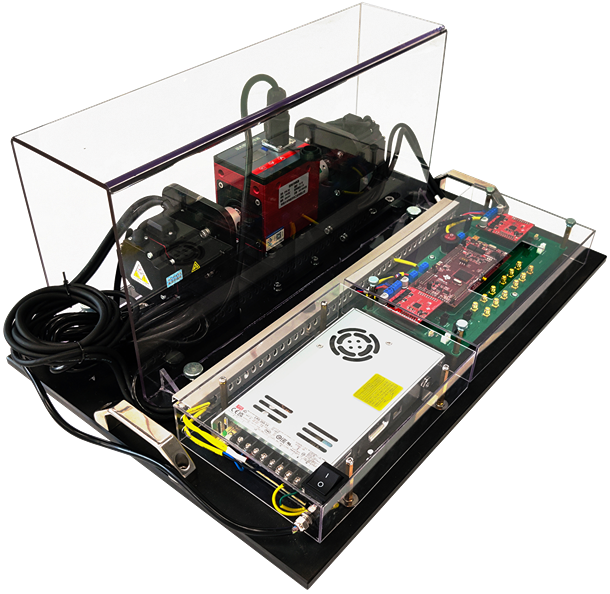
小型桌面电机加载平台是一款用于实现三相永磁同步电机(也可用于感应电机、步进电机等)高效和高动态控制的实验平台。该平台提供完整的电机驱动系统,配备两台可同时驱动的电机,每台电机均有独立电源供电,其中一台电机作为电子可调负载,由嵌入式控制系统驱动。
平台集成了高质量电源,具备可靠的电源、控制和反馈信号隔离功能,能够精确测量电机电流和电压信号,还设有实现控制器快速响应的控制信号高速接口。它支持PID、滑模等经典算法,安全性高且便于教学。学生可通过在该平台上设计位置环、速度环和电流环,深入理解和掌握电机与拖动理论的基本原理及应用方法,同时通过改变控制方法和参数,观察实验效果,进而理解不同控制方法的差异以及参数对控制系统性能指标的影响。
产品特点
- 工业级制造标准:遵循工业设计理念,全部采用工业级零部件制造,保证系统的可靠性和稳定性。
- 开源控制环设计:拥有完备的电流环、速度环、位置环,并且这些控制环全部开源,方便用户深入研究和根据自身需求定制控制策略。
- 丰富的算法支持:不仅支持PID、滑模等经典算法,还能用于验证滑模控制、自适应控制、模糊控制、弱磁控制等先进算法,为研究不同控制算法提供了便利条件。
- 教学友好性高:安全可靠的特性使其非常适合教学场景,有助于学生理解电机控制理论,以及不同控制算法之间的差异,同时能让学生清晰认识到参数对控制系统性能的影响。
适用场景
- 教学领域:在高校或职业院校的相关课程教学中发挥重要作用,如电机与拖动、自动控制原理等课程,帮助学生将抽象的理论知识与实际操作相结合,加深对专业知识的理解和掌握。
- 科研领域:为电机控制领域的科研人员提供了一个实用的实验平台,可用于验证新的控制算法、深入研究电机特性以及对电机控制系统进行优化等科研工作。
参数规格
| 参数类别 | 参数详情 |
|---|---|
| 电机类型 | 永磁同步电机(MR060,1台测试机1台加载)、60V高质量直流Teknic伺服电机(2个,具有内置编码器) |
| 电控单元 | 电机电控单元(MR-Ctl-060,2个) |
| 驱动器 | 电机驱动器(MR-Drv-060,2个) |
| 控制系统 | MatSimBox M660实时控制系统 |
| 配套软件 | Simulink配套软件(MR-060-V1.6)、电机控制实验软件(源代码) |
| 上位机系统 | 上位机系统硬件和软件(ETL-i7) |
相关课程
- 电机与拖动课程:借助平台实验,帮助学生直观理解电机的工作原理、拖动特性以及电机控制的基本方法,提升对电机运行机制的认知。
- 自动控制原理课程:利用平台支持的多种控制算法,让学生深入学习不同控制算法的原理、设计过程和实际应用,对比各算法的优缺点,理解参数对控制系统性能的影响,强化对自动控制原理的理解和运用。
- 电力电子技术课程:该平台涉及电机驱动系统中的电力电子器件的工作原理和应用,有助于学生理解如何利用电力电子技术实现对电机的高效控制,掌握电力电子技术在电机控制领域的应用要点。
- 运动控制系统课程:通过在平台上进行实验,学生能够综合学习电机的运动控制策略,包括位置控制、速度控制和扭矩控制等,培养设计和实现完整运动控制系统的能力,提升对运动控制系统的整体把握。
 Details
Details船吊控制系统平台 ET-SC-06
- #自动控制/欠驱动
- @吊车
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。
 Details
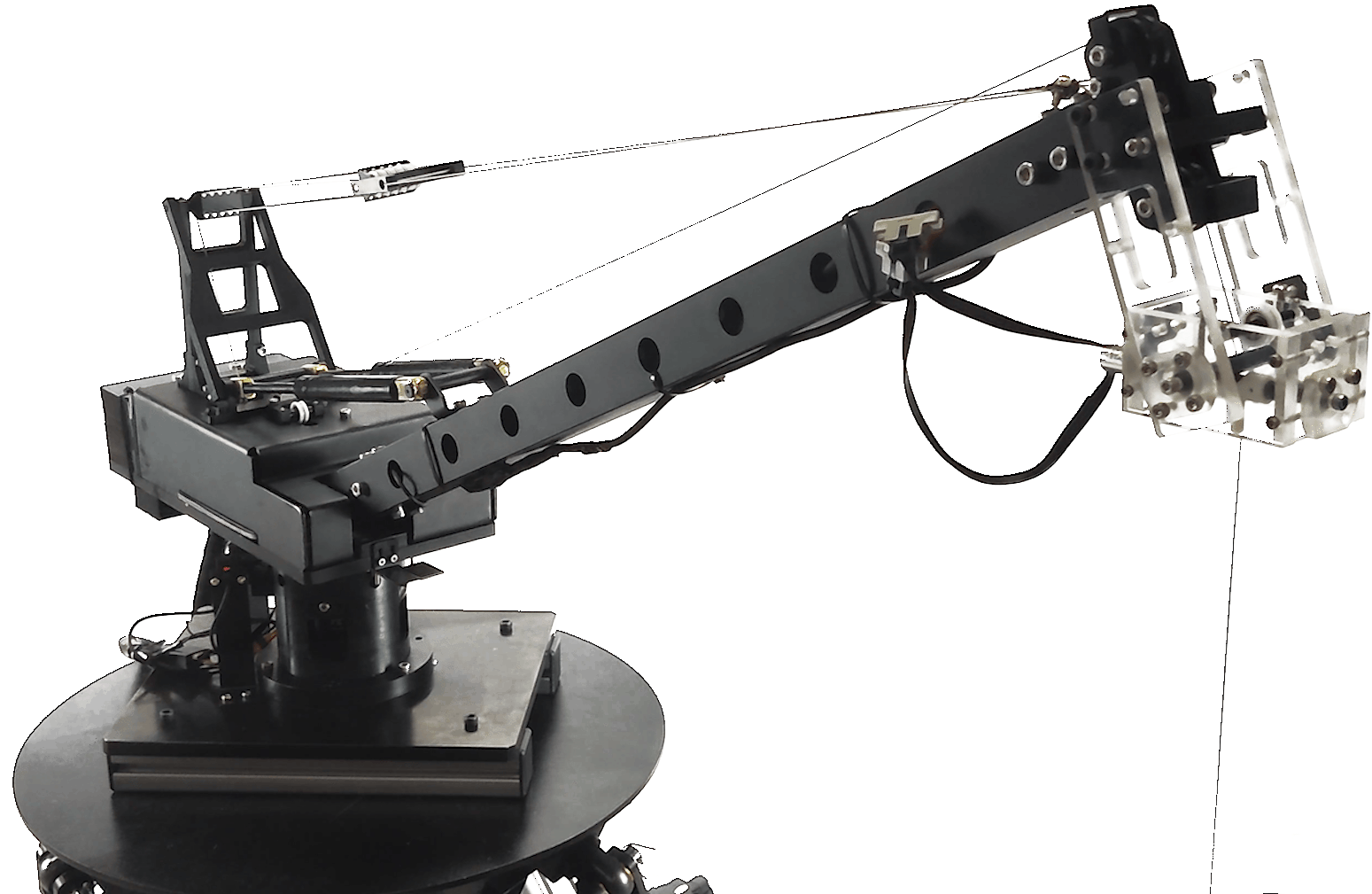
Details三自由塔式吊车实验平台TC-05
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
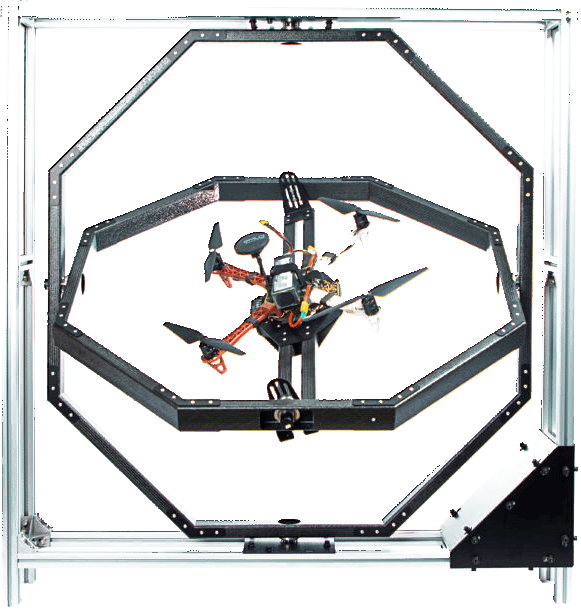
Details多旋翼无人机测试系统平台MQP-02
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。
 Details
Details多智能体机器人实验平台
- #机器人
- @多智能体
建立多智能体机器人协调系统,实现多个机器人的相互协调与合作。
 Details
DetailsAcrobot
- #自动控制/欠驱动
- @倒立摆
体操机器人(Acrobot)是一种灵活的机械设计,模仿人体动作,具有出色的平衡和敏捷性,可用于执行各种复杂的体操动作。
 Details
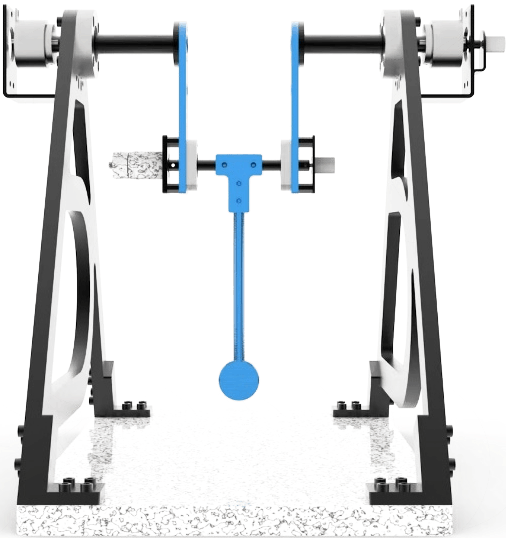
DetailsPendubot
- #自动控制/欠驱动
- @倒立摆
Pendubot是一种摆式机器人,它通过一个或多个关节连接的方式来模拟摆动运动,它简单而直观的动作可以帮助人们理解控制理论和动力学概念。