产品概述
六自由度机械臂是一个集成度高、功能丰富的机器人教学科研平台,由 Matlab 上位机和实时控制器构成控制系统,协作机器人本体、电磁铁(末端执行器)及配套电气部件组成执行系统。Matlab 上位机用于编写、编译和调试控制程序,实时控制器负责程序执行,二者通过 Ethernet 网络连接。机器人本体为六自由度,有多种负载可选,最大工作半径 550mm,自重 17Kg,各关节集成多种组件并通过 Ethernet 总线组网。末端执行器通过电磁铁吸取磁性物体,配套电气部件保障系统安全稳定运行。
产品特点
- 多语言编程支持:支持 Python、C/C++、Matlab 等多种编程语言,方便不同技术背景的用户进行开发与控制,满足多样化编程需求。
- 高精度与高安全性:重复定位精度达 1mm,确保操作精准;当信号阶跃过大时自动停机保护,适合人机协同工作场景,保障人员和设备安全。
- 丰富接口功能:通信端口包括 CAN / 以太网,通讯频率不低于 200Hz,且支持 ROS 接口,可实现关节空间和笛卡尔空间的运动规划与动力学控制。
- 全面实验教学资源:提供多本专业教材作为学习参考,涵盖丰富实验内容,从系统认知、单轴控制到复杂运动学验证、视觉标定及力反馈应用等,满足教学与科研需求 。
适用场景
- 高校教学:为机械工程、自动化、机器人学等专业学生提供实践平台。学生可通过机器人系统组成认知、单轴控制、运动学验证等实验,深入理解机器人原理和操作方法,提升实践能力。
- 科研项目:科研人员利用该平台进行机器人运动规划、视觉识别、力反馈控制等研究。如基于强化学习算法的机器人轴孔装配实验,推动机器人技术在复杂任务中的应用研究
参数规格
| 机械臂 | 参数详情 | 参数值 |
|---|---|---|
| 基本配置 | 负载 | 末端负载1.2kg(另有3kg、5kg、10kg版本可选) |
| 基本配置 | 自重 | 17Kg |
| 基本配置 | 自由度 | 6 |
| 基本配置 | 安装方式 | 桌面/框架/倒置/倾斜 |
| 基本配置 | 防护等级 | IP54 |
| 基本配置 | 结构件材料 | 铝合金/碳纤维 |
| 基本配置 | 尺寸 | 长160mm×宽100mm×高550mm |
| 定位精度 | 重复定位精度 | 1mm |
| 工作环境 | 电压 | 24V - 48V |
| 工作环境 | 功耗 | <150W |
| 工作环境 | 工作温度 | 10°~50° |
| 控制器 | 参数详情 | 参数值 |
|---|---|---|
| 硬件配置 | CPU | Intel 8代酷睿i7及以上 |
| 硬件配置 | 内存 | 8G |
| 硬件配置 | 硬盘 | 256G |
| 硬件配置 | 网卡 | 千兆网卡、Wi-Fi无线网卡 |
| 硬件配置 | 接口 | HDMI 2.0a |
| 硬件配置 | 接口 | USB-A 3.1 |
| 硬件配置 | 接口 | USB-A 2.0 |
| 硬件配置 | 尺寸 | 150mm×150mm×50mm |
| 步进电机参数 | 42CM04D | 42CM06D |
|---|---|---|
| 底座尺寸 | 42mm | 42mm |
| 电机重量 | 280g | 350g |
| 电机长度 | 39mm | 47mm |
| 电机轴径 | 5mm | 5mm |
| 电机键槽平台 | 4.5 | 4.5 |
| 前出轴 | 24mm | 24mm |
| 后出轴 | 0 | 0 |
| 电机出线类型 | 散线 | 散线 |
| 出线数目 | 4 | 4 |
| 相数 | 2 | 2 |
| 保持力矩 | 0.45N·m | 0.6N·m |
| 额定电流 | 1.5A | 2.5A |
相关课程
- 机器人学基础课程:讲解机器人的基本结构、运动学和动力学原理。
- 机器人编程课程:教授Python、C/C++、Matlab等在机器人控制中的编程应用。
- 机器人视觉与控制课程:围绕机器人视觉标定、基于视觉的控制策略展开教学。
- 机器人强化学习课程:研究强化学习算法在机器人操作任务中的应用。
 Details
Details小型四足机器人实验平台
- #机器人
- @仿生机器人
小型四足机器人实验平台(ET_PROs_08 系列)由 EASYTOLAB 精心打造,是一款集科研探索与教学实践于一体的创新型机器人实验设备,依托 Matlab 和 Simulink 的强大功能,为腿式机器人领域的发展注入新活力。
 Details
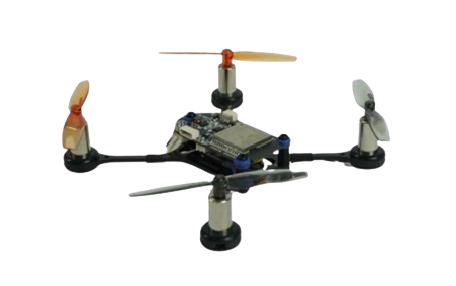
Details小型四旋翼无人机
- #机器人
- @空中机器人
EASYTOLAB 推出的小型四旋翼无人机开发套件,是一款专为无人机开发爱好者、教育科研人员打造的创新产品,集先进硬件配置、丰富软件资源与完善配件于一体,为探索无人机技术提供了理想平台。
 Details
Details基于DSP的新能源实验平台
- #电机与电气
- @DSP与嵌入式系统
基于 DSP 的新能源实验平台(N100 系列)由 EASYTOLAB 精心打造,专为电气工程与自动化专业的本科生提供一个将理论知识与实践操作紧密结合的学习平台。和动态负载控制提供了创新性和实际应用价值极高的研究工具。
/images/cover.png) Details
Details磁悬浮实验平台(OT - ME - 102)
- #其他
磁悬浮实验平台 (OT - ME - 102) 是一款聚焦于磁悬浮系统和电磁控制技术研究的专业实验平台,在教育与科研领域有着重要价值。
 Details
DetailsMatSimBox D007 实时仿真系统
- #Matlab实时控制器
MatSimBox D007 实时仿真系统是一款功能强大、应用广泛的专业仿真工具,旨在为多个领域提供高效、精准的实时仿真解决方案,助力用户进行系统设计、性能评估、算法验证等工作。
 Details
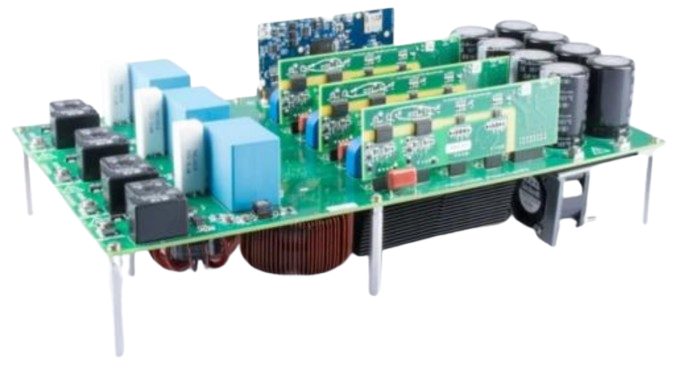
DetailsDC-AC变流模块
- #电机与电气
- @电力电子
DC-AC 变流模块是一款应用广泛、功能强大的三相桥式全控型变流器,主要应用于新能源变流、电机控制、电能质量管理等多个领域。它采用智能功率模块(IPM),具备能量双向变换能力,能满足复杂电力电子系统在实验研究和工业应用中的需求。