船吊控制系统平台 ET-SC-06
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。
#自动控制/欠驱动 @吊车联系我们产品概述
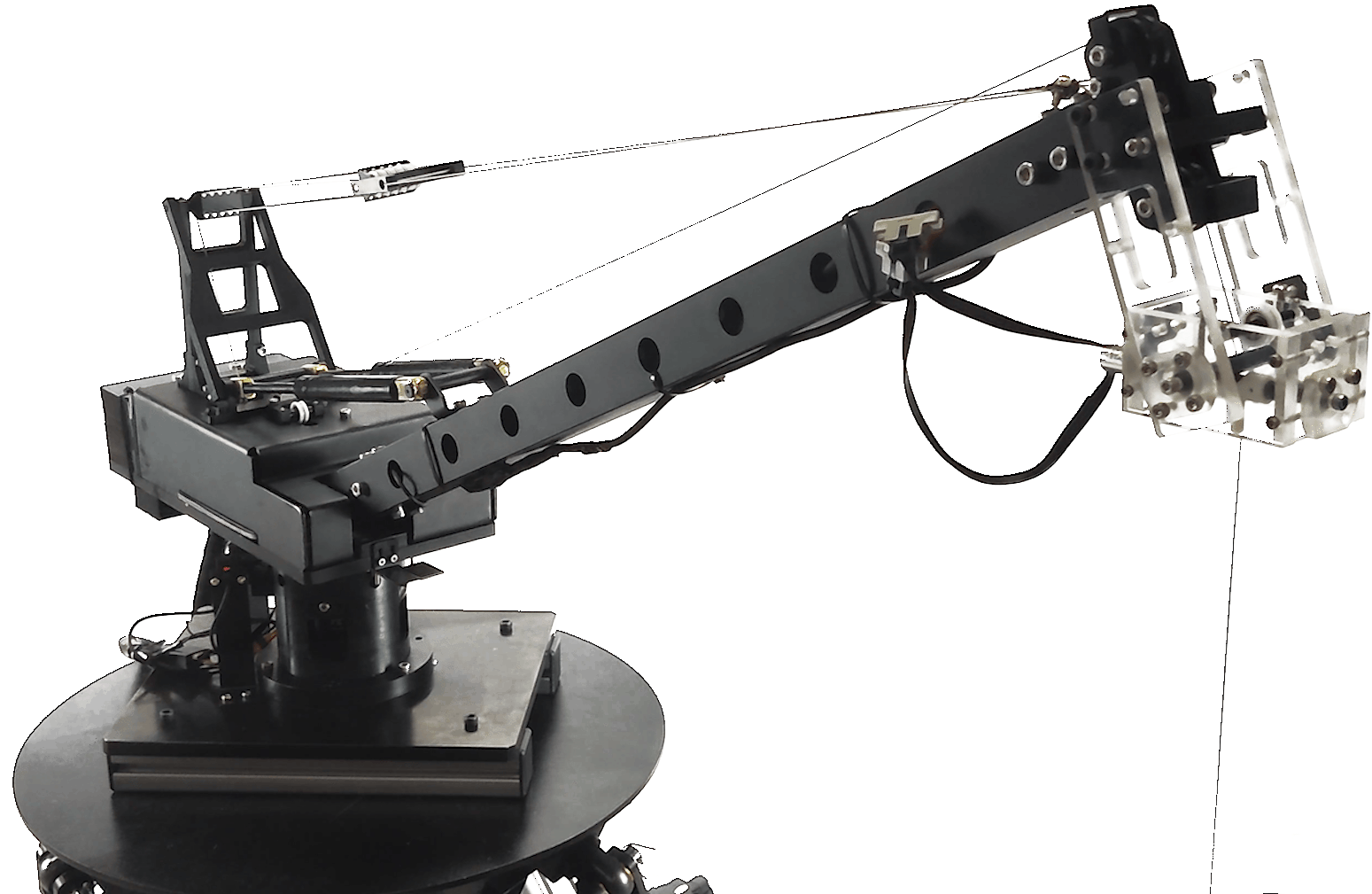
船吊控制系统平台ET-SC-06是用于模拟海上吊车的控制系统,主要包括两部分:
- 主吊车系统:负责吊运货物,通过控制负载的三维轨迹和抑制摆动。
- Stewart六自由度风浪模拟器:模拟海上风浪,配合MATLAB/Simulink快速原型和硬件在环(HIL)开发。
产品特点
- 完全集成MATLAB/Simulink,支持实时运行和快速原型设计,无需编写C代码。
- 提供多种预编程控制实验,帮助用户构建和测试新算法。
- 支持对海浪的模拟,采用六自由度控制平台,能够有效模拟船体运动的影响。
适用场景
- 海上船吊货物运输,尤其是需要解决负载摆动和船体运动对控制系统影响的场景。
- 适用于船用吊车的控制系统设计和测试,尤其是在风浪影响下的动态控制问题。
参数规格
船吊主体平台
| 规格 | 数值 |
|---|---|
| 设备质量 | 35 Kg |
| 塔高度(从底板到顶部) | 1800 mm |
| 塔底尺寸(长 x 宽 x 高) | (1100-1600)x 1050 x 1800 毫米 |
| 臂架长度(水平部分) | 1100-1500 mm |
| 编码器计数分辨率(正交) | 16384 counts/rev |
| 有效塔角分辨率 | 2.197 x 10^-4 Deg |
| 有效载荷框架偏转角度分辨率 | 0.02197 Deg |
| 电机阻力(TOWER/TROLLEY/PAYLOAD) | 7.5 Ω |
| 扭矩恒定电流(TOWER/TROLLEY/PAYLOAD) | 0.52 N.m/A |
| 输出功率(TOWER/TROLLEY/PAYLOAD) | 120 W |
| 最大连续电流(TOWER/TROLLEY/PAYLOAD) | 1.21 A |
| 电机减速比(TOWER/TROLLEY/PAYLOAD) | 100 |
| 电机负载到滑轮比(TOWER/TROLLEY/PAYLOAD) | 2 |
六自由度风浪模拟器
| 规格 | 数值 |
|---|---|
| 有效载荷 | 80 Kg |
| 极限俯仰倾斜度 | ±16° |
| 极限横滚倾斜度 | ±16° |
| 平台运动行程 | 100 mm |
| 数据精度 | 100指令/秒 |
| 平台尺寸 | 800 x 800 mm |
| 运动模式 | 三自由度曲柄 |
| 平台功率 | 2.5 KW |
| 漏电保护 | 有 |
| 护罩保护 | 有 |
| 平台运动供电 | 220V/50Hz |
| 电机额定转速 | 3000 rpm |
| 电机工作电流 | 3.5 A |
| 电机额定功率 | 750 x 3 W |
| 扭矩 | 2.39 N.m |
| 额定转速 | 3000 rpm |
| 供电电压 | 220V AC |
| 系统最大功率 | 2.25 kW |
相关课程
- MATLAB/Simulink快速原型与硬件在环(HIL)开发
- 船吊控制系统设计与模拟
- 风浪模拟与控制算法优化
 Details
Details三自由塔式吊车实验平台TC-05
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
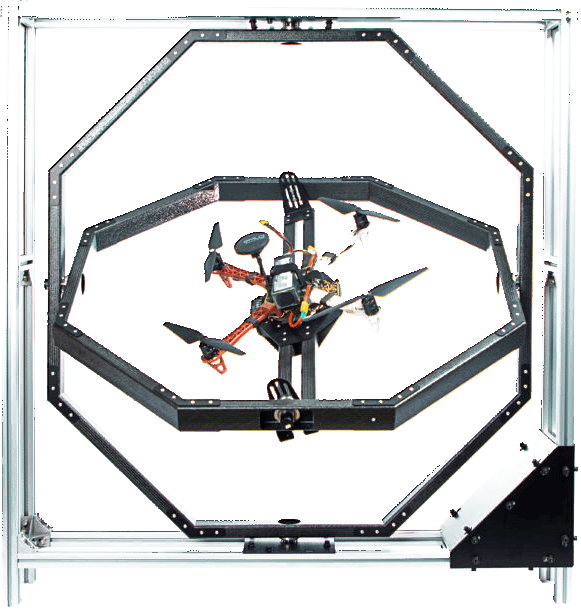
Details多旋翼无人机测试系统平台MQP-02
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。
 Details
Details多智能体机器人实验平台
- #机器人
- @多智能体
建立多智能体机器人协调系统,实现多个机器人的相互协调与合作。
 Details
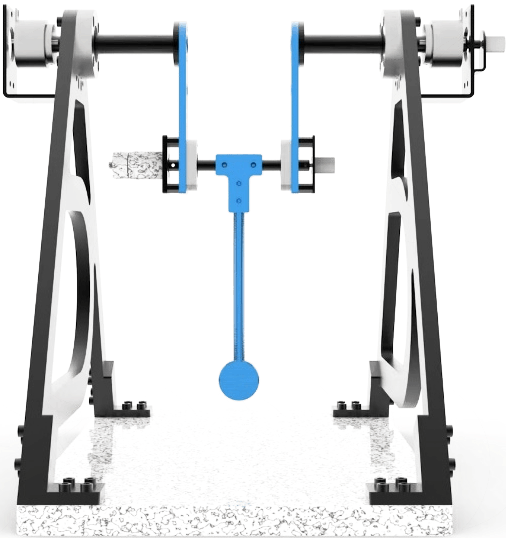
DetailsAcrobot
- #自动控制/欠驱动
- @倒立摆
体操机器人(Acrobot)是一种灵活的机械设计,模仿人体动作,具有出色的平衡和敏捷性,可用于执行各种复杂的体操动作。
 Details
DetailsPendubot
- #自动控制/欠驱动
- @倒立摆
Pendubot是一种摆式机器人,它通过一个或多个关节连接的方式来模拟摆动运动,它简单而直观的动作可以帮助人们理解控制理论和动力学概念。
 Details
Details三级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。