产品概述
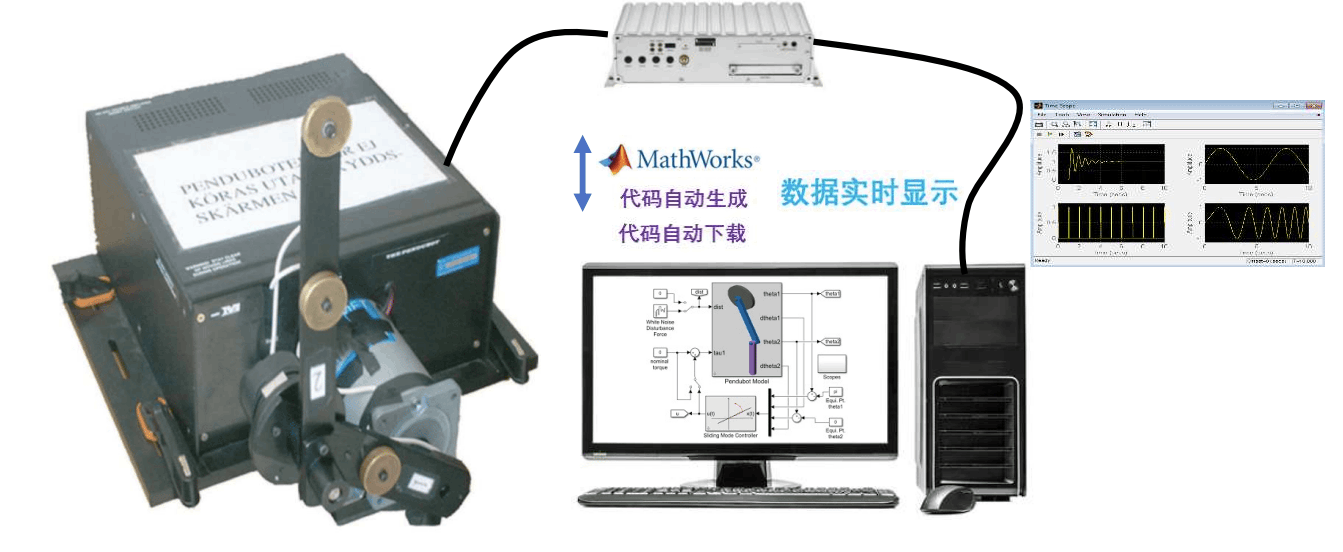
Pendubot是一款适用于研究与教学欠驱动控制系统和非线性控制理论的欠驱动系统控制平台。它由两个连杆构成,其中第二个连杆(水平杆)由单个伺服电机驱动,形成欠驱动系统。系统的任务是让第二个连杆通过输入的控制信号保持平衡,并借助合适的控制算法使其达到稳定的倒立位置。
由于控制输入数量少于自由度数目,在该系统中,研究人员需运用PID控制、LQR控制、模糊控制、强化学习控制等先进算法,来维持系统稳定并使其达到目标状态。它非常适合作为控制理论、非线性控制、机器人学和运动控制的实验平台。
适用平台:
- MATLAB/Simulink:支持Simulink Real-Time,可进行建模、仿真和实时控制。
- LabVIEW:用于信号处理、数据采集以及控制系统的调试。
- Windows/Linux操作系统:适用于多平台开发。
- Python/C++:用于自定义控制算法开发。
- ROS:用于机器人控制和仿真,尤其适合集成到复杂的机器人平台中。
适用软件:
- MATLAB/Simulink:用于系统建模、控制设计与仿真。
- LabVIEW:用于实时控制和信号监控。
- Xilinx SDK:用于FPGA控制与代码生成。
产品特点
欠驱动系统
- 两个自由度:系统有两个自由度,但仅由一个伺服电机驱动,是典型的欠驱动系统。
- 非线性系统:具有强烈的非线性特性,控制时需运用非线性控制理论。
- 控制挑战:控制输入数量少于自由度,依赖高效控制方法(如PID、LQR、模糊控制、强化学习等)来稳定系统。
高精度控制与反馈
- 高分辨率位置传感器:系统配备高精度位置传感器,能实时获取系统各部分的位置和角度。
- 实时数据采集:支持实时数据采集与分析,可通过连接Simulink或LabVIEW软件,实时监控实验数据。
- 精准的控制输入:通过精确的PWM控制和编码器反馈,保障系统的稳定性。
开放式实验平台
- 开放式控制接口:支持MATLAB/Simulink、LabVIEW和Python等多种开发接口,满足学术研究和教学需求。
- 实验功能丰富:用户可调节控制算法和反馈机制,尝试不同的控制方法,优化系统的稳定性和响应速度。
适用场景
控制系统与非线性系统研究
- 作为非线性控制的研究平台,特别是针对欠驱动系统和非完整约束系统的稳定性与控制策略研究。
- 用于倒立摆控制实验,探究如何利用有限的控制输入使系统保持平衡。
教学与实验平台
- 机器人学:Pendubot可作为机器人控制实验平台,用于运动控制、路径规划、非线性控制等课程的教学和研究。
- 控制理论课程:尤其适用于学习如何设计和调节PID控制器、LQR控制器等。
强化学习与智能控制
- 用于强化学习和自适应控制在欠驱动系统中的应用研究。
- 适用于智能控制系统的研究,探索通过机器学习和智能算法实现系统的自主控制。
机器人与自动化研究
- 可用于机器人关节控制和柔性机器人控制的研究,测试动态系统控制和倒立摆类型的机器人系统。
- 自动化控制与监测:Pendubot还可应用于自动化系统控制和工业自动化过程的验证与优化。
参数规格
| 功能 | 规格 |
|---|---|
| 系统自由度 | 2自由度(两个连杆,1个伺服电机) |
| 执行器类型 | 永磁同步电机(PMDC) |
| 控制方式 | PID控制、LQR控制、模糊控制、强化学习控制 |
| 最大角度 | ±90°每个连杆 |
| 编码器分辨率 | 0.001°(高精度位置反馈) |
| 电源要求 | 24V DC电源接口 |
| 尺寸 | 32 cm × 36 cm × 18 cm |
| 最大负载 | 适用于轻量负载应用(小于2 kg) |
| 最大功率输出 | 50W(伺服电机) |
| 反馈方式 | 高分辨率光学编码器、位置传感器 |
| 控制接口 | PWM控制、编码器与模拟输入/输出 |
| 通信接口 | USB、CAN或无线通信 |
相关课程
控制系统与欠驱动系统
- 非线性控制与欠驱动系统:深入钻研欠驱动系统的控制方法,理解其在航空航天、机器人控制等领域的应用。
- PID控制与LQR控制:学习设计PID控制器和最优控制(LQR),以实现欠驱动系统的稳定。
机器人学
- 多自由度机器人控制:研究如何凭借少量的控制输入,实现多自由度系统的稳定与运动。
- 路径规划与轨迹跟踪:通过实验和仿真,学习机器人的路径规划和轨迹跟踪算法,并在欠驱动系统中应用。
强化学习与自适应控制
- 强化学习算法:研究强化学习在欠驱动控制中的应用,优化系统控制策略。
- 自适应控制:研究如何运用自适应控制方法应对系统的不确定性和变化。
MATLAB/Simulink实验课程
- Simulink控制系统建模:学习使用Simulink构建Pendubot系统模型,并进行实时仿真和控制算法设计。
- Simulink代码自动生成:通过Simulink自动生成控制代码,并部署到实时系统中。
 Details
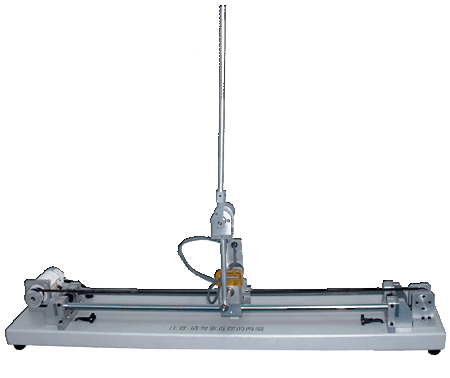
Details三级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。
 Details
Details二级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
二级直线倒立摆是一种控制理论中的经典系统,可用于研究控制理论中的稳定性、鲁棒性等性质。
 Details
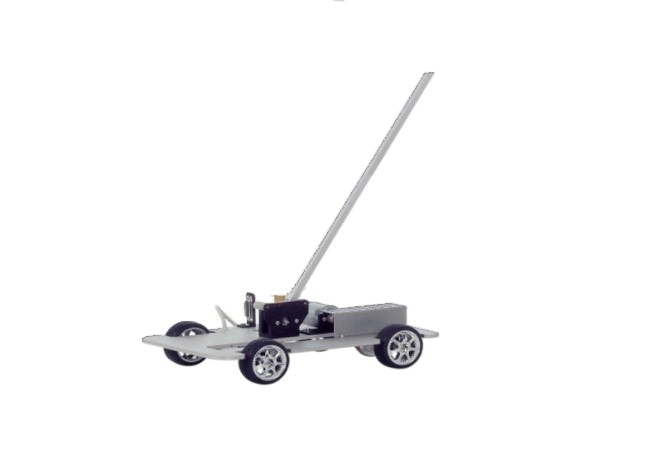
Details小车倒立摆实验平台系列
- #自动控制/欠驱动
- @倒立摆
小车倒立摆实验的主要目的是通过控制一辆带有倒立摆的小车,使其能够在直立位置上保持平衡
 Details
DetailsBuck 电路实验平台
- #电机与电气
- @电机
Buck 电路实验平台是一款专为学习数字电源控制基础知识设计的实验设备。该平台支持多种经典控制算法,学生借助 Matlab 等软件,能设计和实验不同控制算法,观察参数变化对系统性能的影响,从而深入理解控制理论。
 Details
DetailsSCARA 机械臂实验平台
- #机器人
- @机械臂
SCARA 机械臂实验平台是一款专为高等院校和研究机构的教学与科研工作设计的实验设备,它将先进技术与实用功能相结合,在多个领域发挥着重要作用。控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
Details地空协同实验平台
- #机器人
- @多智能体
地空协同实验平台,集成了先进的动作捕捉技术、无人车自主驾驶技术和无人机飞行控制技术,旨在为科研人员、工程师和教育工作者提供一个全面且高效的实验环境,用于研究和开发地空协同控制算法、验证系统性能以及探索多智能体交互的新应用场景。