产品概述
多智能体机器人实验平台专注于智能机器人的信息集成和协调技术。它将每个机器人视为一个智能体,构建多智能体机器人协调系统,借助Simulink/LabView软件系统,可实现实时控制算法的快速原型验证。平台提供基本控制器库,上位机系统能够实时显示小车的位置和速度,真正达成“仿真即实验”的目的。

产品特点
- 二次开发便捷:提供基本控制算法,为研究人员的二次开发提供便利。
- 多语言与系统支持:支持C程序语言以及GNU GCC编译系统,同时支持Matlab®/Simulink®快速原型(RCP)验证。
- 功能丰富集成:具备视觉定位、代码自动下载、数据实时显示等功能,实验结果可生成可执行文件并作为实时控制器运行。
适用场景
-
教育领域:涵盖基本程序、嵌入式计算、讯号处理、机器人控制、移动机器人学、机器人间通讯、影像与声音的特征抽取、机器人工程学、创新机器人学等教学方向。
-
研究领域:适用于生物机器人学、群体智慧、社会昆虫学、机器人合作行为研究。具体包括合作搬运、路径信息研究、坐标运动、搜索粮秣(foraging) - 费洛蒙研究、结构塑性研究、自我组装研究等。
参数规格
| 参数类别 | 参数详情 |
|---|---|
| 外形尺寸 | 直径100mm |
| 电池 | 1600mAh锂电池 |
| 处理器 | 32-bit STM32F407 @ 168 MHz (210 DMIPS) |
| 内存 | RAM 192 KB;Flash 1024 KB; |
| 电机 | 2个电机,每转20步,减速齿轮20:1 |
| 车轮 | 车轮直径41mm;两轮间轴距53mm |
| 速度 | 最大速度1200步每秒,约为15.4cm/s |
| 摄像头 | VGA彩色相机,分辨率160x120 |
| IMU | 配备加速度计、陀螺仪和磁强计 |
| LED灯组 | 4个红色led和4个RGBled围绕机器人; |
相关课程
- 机器人编程基础课程,教授C语言在机器人控制中的编程应用;
- 移动机器人技术课程,讲解移动机器人的运动原理和定位导航知识;
- 机器人感知与交互课程,围绕机器人视觉、IMU传感器应用及机器人间通讯进行教学。
 Details
DetailsAcrobot
- #自动控制/欠驱动
- @倒立摆
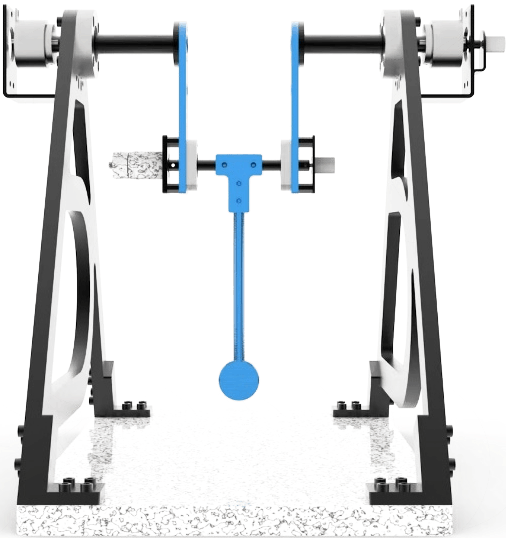
体操机器人(Acrobot)是一种灵活的机械设计,模仿人体动作,具有出色的平衡和敏捷性,可用于执行各种复杂的体操动作。
 Details
DetailsPendubot
- #自动控制/欠驱动
- @倒立摆
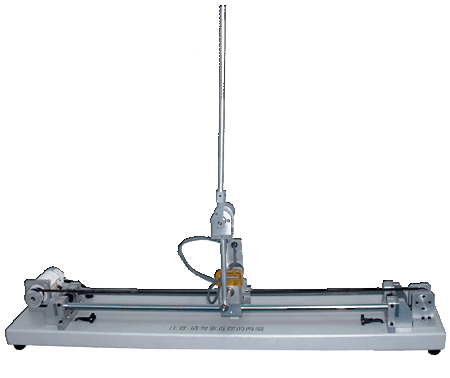
Pendubot是一种摆式机器人,它通过一个或多个关节连接的方式来模拟摆动运动,它简单而直观的动作可以帮助人们理解控制理论和动力学概念。
 Details
Details三级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
三级直线倒立摆可用于研究控制理论、工程应用和机器人技术等领域。通过对其动态特性的分析和控制,可以深入理解复杂系统的运动规律,并为设计高性能控制系统提供理论支持。
 Details
Details二级直线倒立摆
- #自动控制/欠驱动
- @倒立摆
二级直线倒立摆是一种控制理论中的经典系统,可用于研究控制理论中的稳定性、鲁棒性等性质。
 Details
Details小车倒立摆实验平台系列
- #自动控制/欠驱动
- @倒立摆
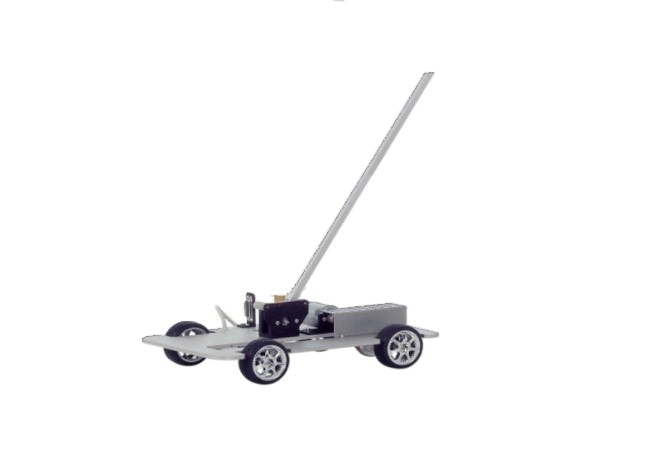
小车倒立摆实验的主要目的是通过控制一辆带有倒立摆的小车,使其能够在直立位置上保持平衡
 Details
DetailsBuck 电路实验平台
- #电机与电气
- @电机
Buck 电路实验平台是一款专为学习数字电源控制基础知识设计的实验设备。该平台支持多种经典控制算法,学生借助 Matlab 等软件,能设计和实验不同控制算法,观察参数变化对系统性能的影响,从而深入理解控制理论。