地空协同实验平台
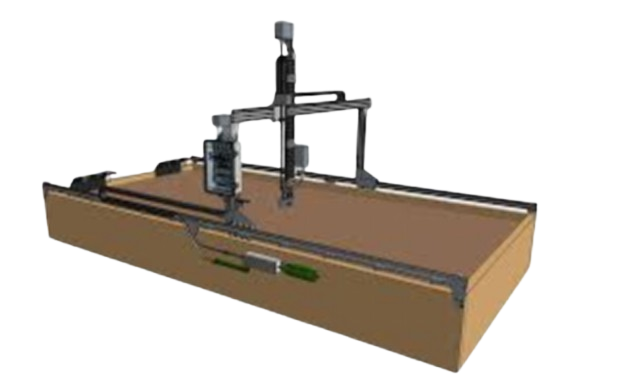
地空协同实验平台,集成了先进的动作捕捉技术、无人车自主驾驶技术和无人机飞行控制技术,旨在为科研人员、工程师和教育工作者提供一个全面且高效的实验环境,用于研究和开发地空协同控制算法、验证系统性能以及探索多智能体交互的新应用场景。
#机器人 @多智能体联系我们产品概述
地空协同实验平台融合了青瞳视觉高精红外光学动作捕捉系统、自主驾驶无人车、灵活的小型四旋翼无人机。动捕系统可实时追踪测量三维空间内点与刚体运动;无人车依靠多种传感器和算法实现自主驾驶;小型四旋翼无人机轻巧且应用广泛。三者组合能开展从无人车、无人机单独测试,到地空协同作业等多类型实验,为科研和技术优化提供数据支撑。
产品特点
- 定位精度高,可精确获取目标物体位置等数据;能实时反馈运动信息,快速响应调整;
- 安全性佳,有先进避障系统;自适应性良好,能应对复杂交通环境和天气;驾驶体验舒适,乘客可自由活动;
- 飞行灵活机动,可稳定悬停和多向移动;操作简单,初学者易上手;功能多样,可搭载多种设备;
适用场景
- 科研领域:用于多智能体系统交互、协同工作能力研究,在无人机编队飞行、SLAM、动态避障等研究中提供数据支持。
- 工业领域:可应用于物流配送、工业自动化等场景,提高生产效率和安全性。
- 教育领域:为高校和研究机构相关专业教学提供实验平台,助力学生理解和实践控制理论、机器人技术等知识。
参数规格
| 参数名称 | 无人车 | 无人机 |
|---|---|---|
| 重量 | 净重≤50kg,负载≥50kg | 约 28 克(机身) |
| 动力 | 24VDC 锂聚合物电池 | 400mAh Li-Po 电池 |
| 驱动 | 四驱,差速转向 | 716 空心杯电机 |
| 通信 | RS232/RS485,频率≥50Hz; | 2.4GHz ISM Band;开源、模块化; |
| 传感器 | 深度相机:视场≥75° 等;激光雷达:测距≥8m 等 | 三轴陀螺仪等多种传感器 |
相关课程
- 机器人学:学习机器人运动控制、导航、避障等技术。
- 智能控制理论:掌握PID控制、自适应控制等智能控制算法的原理和应用。
- 计算机视觉:开展目标识别、定位、跟踪等实验,熟悉计算机视觉技术应用。
- 多智能体系统:了解多智能体协作机制、通信方式和任务分配策略。
- 自动驾驶技术:学习无人车自主驾驶的路径规划、环境感知、决策与控制等技术。
 Details
Details多电机加载实验平台
- #电机与电气
- @DSP与嵌入式系统
多电机加载实验平台,能够同时控制多种类型的电机,包括直流电机、直流无刷电机、步进电机以及舵机等,为用户提供了一个多功能的实验 环境。
 Details
Details农业机器人
- #机器人
- @农业机器人
农业机器人(Argrobot)是一款由 EASYTOLAB 联合多所高校共同研发的创新型农业设备,旨在为现代智慧农业提供全面、高效的解决方案,同时助力培养跨学科专业人才。
 Details
Details双足轮式机器人实验平台
- #机器人
- @仿生机器人
双足轮式机器人实验平台是一款融合前沿技术与创新理念的卓越科研教学设备,依托 Matlab 和 Simulink 的强大功能,为机器人领域的探索与学习提供了理想平台。
 Details
Details六自由度机械臂
- #机器人
- @机械臂
六自由度机械臂,是一款集教学、科研多功能于一体的先进机器人平台。该系统融合前沿技术与创新设计理念,为多领域用户提供高效、便捷的机器人操作体验,有力推动机器人技术的研究与应用。
 Details
Details小型四足机器人实验平台
- #机器人
- @仿生机器人
小型四足机器人实验平台(ET_PROs_08 系列)由 EASYTOLAB 精心打造,是一款集科研探索与教学实践于一体的创新型机器人实验设备,依托 Matlab 和 Simulink 的强大功能,为腿式机器人领域的发展注入新活力。
 Details
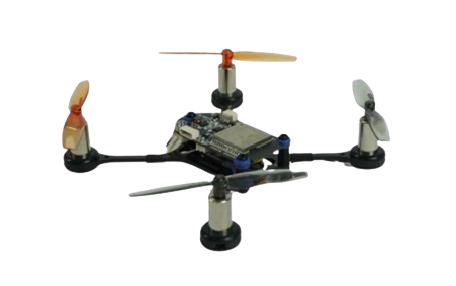
Details小型四旋翼无人机
- #机器人
- @空中机器人
EASYTOLAB 推出的小型四旋翼无人机开发套件,是一款专为无人机开发爱好者、教育科研人员打造的创新产品,集先进硬件配置、丰富软件资源与完善配件于一体,为探索无人机技术提供了理想平台。