产品概述
ET-DUAL-ARM06双臂协作机器人是EasytoLab公司推出的一款面向现代制造业的先进自动化解决方案。它专为复杂、小型零件的高效组装与处理而设计,通过双臂协作设计,具备出色的灵活性和易用性,助力企业实现智能制造,提升生产效率。
产品特点
- 双臂协作设计
- 同步操作:配备两只可独立且协同工作的机械臂,能同时执行抓取、组装、搬运等任务,大幅提高生产效率。
- 灵活配置:双臂设计使其可在复杂操作环境中灵活应对多任务需求,适应不同生产线布局。
- 高精度与稳定性
- 精准控制:先进的传感器和控制系统确保在处理微小零件时保持高精度和一致性,满足高标准制造要求。
- 稳定运行:优化的机械结构和动力系统保障长时间、高强度工作的稳定性,降低停机时间和维护成本。
- 用户友好的编程界面
- 直观操作:配备8寸触摸屏示教器的图形用户界面,无需深厚编程基础,操作人员通过拖拽式指令即可轻松设定工作流程。
- 快速部署:预设的模板和示例程序加速机器人在不同应用场景的部署,缩短项目上线时间。
- 高度安全性
- 智能感知:内置碰撞检测和避障功能,符合国际安全标准,保障人机协作安全。
- 防护设计:采用防护罩和安全边界设置,有效防止意外接触和伤害。
- 模块化与扩展性
- 灵活扩展:模块化设计允许根据生产需求灵活增减功能模块,适应不同规模和复杂度的任务。
适用场景
- 电子制造:用于精密电子元件的组装与检测,提高产品质量和生产效率。
- 医疗器械:适用于复杂医疗设备的组装与包装,确保满足卫生和精度要求。
- 汽车制造:可实现小型零部件的高效装配与检测,提升生产线自动化水平。
- 实验室自动化:用于样品处理和实验设备操作,减少人为误差,提高实验效率。
- 食品包装:进行精细包装操作,保障食品安全和包装质量。
参数规格
型号参数
| 参数 | 4kg型号(2kgx2) | 6kg型号(3kgx2) |
|---|---|---|
| 有效负载 | 4kg (2kgx2) | 6kg (3kgx2) |
| 重复定位精度 | ±0.03mm | ±0.03mm |
| 自重 | 10kgx2(不含固定架) | 9.8kgx2(不含固定架) |
| 工作半径 | 679.2mmx2 | 507.2mmx2 |
| 自由度 | 14(7x2) | 14(7x2) |
| 电源电压 | 24V DC | 24V DC |
| 工作环境温度 | 0°C -50°C | 0°C -50°C |
| 防护等级 | IP54 | IP54 |
| 尺寸(长x宽x高) | 1500mm x 800mm x 1200mm | 1500mm x 800mm x 1200mm |
| 重量 | 20kg(不含固定架) | 19.6kg(不含固定架) |
| 安全认证 | CE, ISO 10218, ISO/TS 15066 | CE, ISO 10218, ISO/TS 15066 |
关节参数
| 参数类别 | 4kg型号(2kgx2) | 6kg型号(3kgx2) |
|---|---|---|
| 工作范围 | J1: ±180° J2: ±137° J3: ±180° J4: ±147° J5: ±180° J6: ±180° J7: ±127° | J1: ±180° J2: ±137° J3: ±180° J4: ±147° J5: ±180° J6: ±180° J7: ±127° |
| 最大速度 | J1: 150°/s J2: 150°/s J3: 180°/s J4: 180°/s J5: 192°/s J6: 192°/s J7: 192°/s | J1: 150°/s J2: 150°/s J3: 180°/s J4: 180°/s J5: 192°/s J6: 192°/s J7: 192°/s |
| 末端速度 | ≤2m/s | ≤2m/s |
| 抱闸类型 | 24VDC永磁式 | 24VDC永磁式(关节1、2、3、4) |
性能参数
| 参数类别 | 规格 |
|---|---|
| 功耗(普通工况下) | 600W |
| 额定寿命 | 20000小时 |
| 环境温度 | -20°C ~ 45°C |
| 环境湿度 | 25%~80%(无冷凝) |
| 防护等级 | IP54 |
| 安装方式 | 任意 |
| 噪音 | ≤60dB |
| 通讯协议 | EtherCAT |
| 供电电源 | DC 48V |
| 材质 | 铝合金、尼龙 |
| 底座尺寸 | 718.2mm |
相关课程
- 自动化控制:教授自动化控制理论,以及如何应用这些理论实现对机器人的精确控制。
- MATLAB编程:让学生掌握利用MATLAB对机器人进行编程控制、运动规划、数据分析等技能。
- 工业设计:探讨如何根据不同生产需求,设计机器人的工作流程和应用场景,提高生产效率和产品质量。
 Details
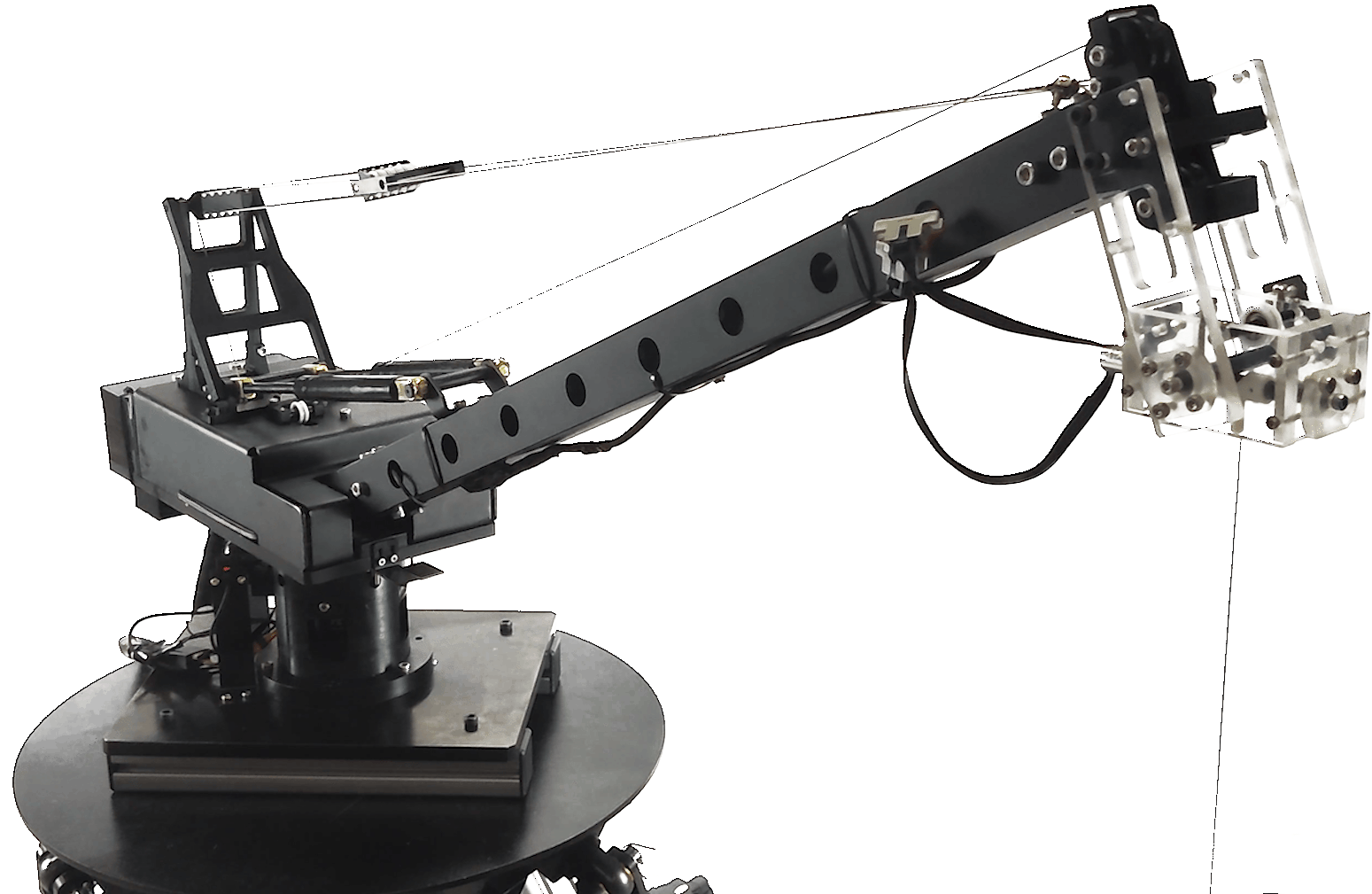
DetailsStewart 实验平台 ST-03
- #机器人
- @机械臂
船吊控制系统平台,结合高度复杂的海洋环境模拟,为精确货物搬运和动态负载控制提供了创新性和实际应用价值极高的研究工具。
 Details
Details三自由度桥式起重机实验平台OHC-02
- #自动控制/欠驱动
- @吊车
桥式吊车实验平台,通过模拟真实世界的起重搬运挑战,为研究和教育提供了一个精准控制负载摆动和动态定位的实用模型。
 Details
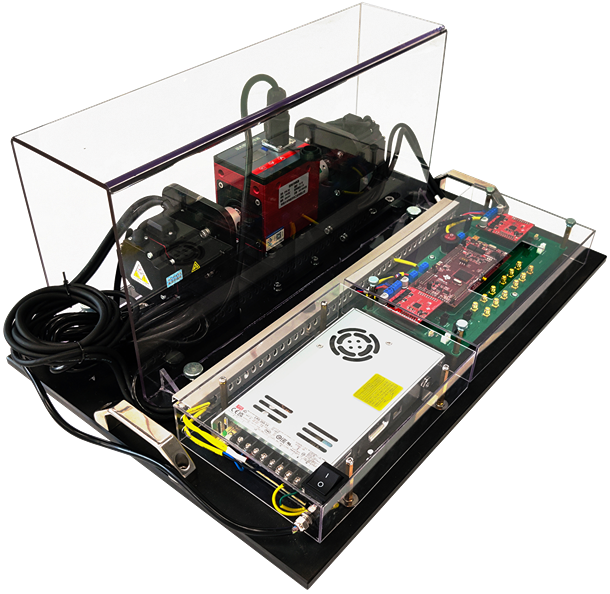
Details小型桌面电机加载平台系列MR-02
- #电机与电气
- @电机
小型桌面电机加载平台提供完整的电机驱动系统,实现三相永磁同步电机 (或者感应电机步进电机等)的高效和高动态控制。
 Details
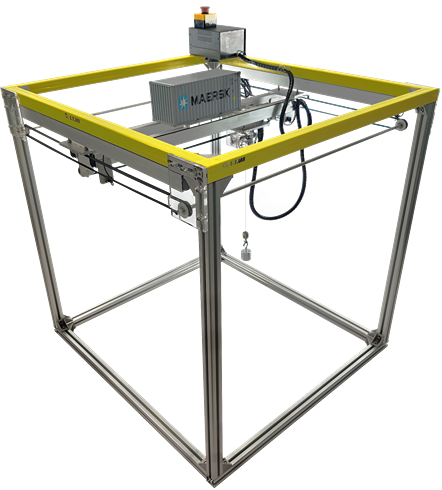
Details船吊控制系统平台 ET-SC-06
- #自动控制/欠驱动
- @吊车
船吊控制系统平台由主吊车系统和 Stewart 六自由度风浪模拟器两部分组成。该系统与 MATLAB/Simulink 完全集成,并且可以实时运行。包括许多预编程的控制实验。
 Details
Details三自由塔式吊车实验平台TC-05
- #自动控制/欠驱动
- @吊车
塔吊实验平台,以其高度非线性和多自由度的控制挑战,为工程教育和高级控制系统研究提供了一个实验性和教育性极高的研究平台。
 Details
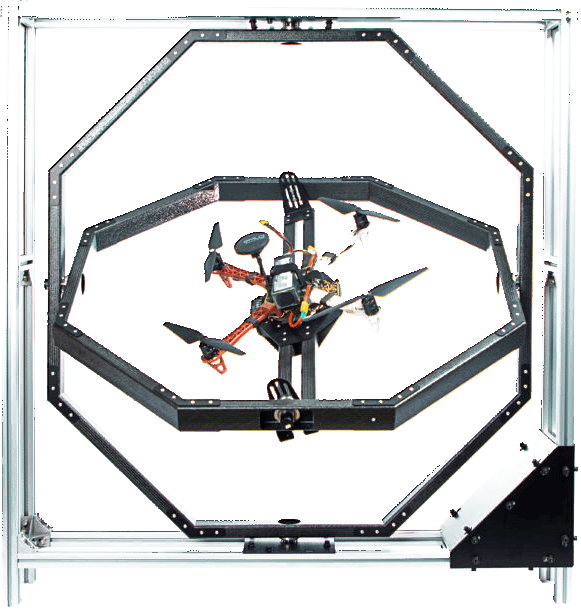
Details多旋翼无人机测试系统平台MQP-02
- #机器人
- @空中机器人
多旋翼无人机测试系统平台有助于理解、开发和实施垂直起降飞行器的机械、电子和软件,而不会危及设备。