
双足轮式机器人实验平台
双足轮式机器人实验平台是一款融合前沿技术与创新理念的卓越科研教学设备,依托 Matlab 和 Simulink 的强大功能,为机器人领域的探索与学习提供了理想平台。
#机器人 @仿生机器人联系我们产品概述
双足轮式机器人实验平台借助 Matlab 和 Simulink 的强大功能,为先进控制研究提供支撑。该平台集成高性能处理器与先进传感器,能够感知环境变化、适应不同地形并进行自主导航。主要应用于腿式机器人的研究与开发、本科生相关课程的实验教学等领域,通过一系列实验帮助学生学习和掌握机器人相关的控制算法、路径规划、传感器数据处理等知识与技能。
产品特点
- 高性价比:能加速腿式机器人研究与开发,降低硬件开发成本,为用户提供理想实验环境,让用户专注于创新,无需在设备维护上投入过多精力。
- 操作灵活简便:基于行业标准的 Matlab 和 Simulink 环境,便于用户进行编程、模拟和测试算法,实现从理论到实践的快速转化,降低学习和使用门槛
- 高度集成且功能强大:集成高性能处理器与先进传感器,具备强大的运算和感知能力,可适应不同地形,在复杂环境中实现自主导航,满足多种实验和研究需求。
- 科研探索性强:适用于学术研究和实践创新,为用户在机器人控制算法、学习算法、路径规划等前沿领域的探索提供支持,具有广阔的应用和研究空间。
适用场景
- 科研领域:助力学术研究,为机器人控制算法、学习算法、路径规划等前沿领域的研究提供实验平台,推动机器人技术的发展。
- 教育教学:适用于高校相关专业本科生的实验教学,通过一系列实验方案,帮助学生掌握机器人相关的理论知识和实践技能,培养学生的创新能力和解决实际问题的能力。
相关课程
- 机器人学:通过实验帮助学生理解机器人的运动学、动力学原理,掌握机器人的控制方法和路径规划策略,培养学生设计和开发机器人系统的能力。
- 自动控制原理:借助姿态控制、自平衡算法设计等实验,让学生实践 PID 控制等经典控制算法,理解反馈控制机制,深入掌握自动控制原理在机器人领域的应用。
- 传感器原理与应用:在传感器数据采集与处理实验中,学生学习各类传感器(如 IMU、距离传感器等)的工作原理、数据采集方法和处理技术,了解传感器在机器人环境感知中的重要作用。
- 机器学习:基于机器学习的障碍检测实验,使学生了解机器学习方法在机器人控制中的应用,学习使用机器学习工具箱进行模型训练和应用,培养学生的机器学习实践能力。
 Details
Details六自由度机械臂
- #机器人
- @机械臂
六自由度机械臂,是一款集教学、科研多功能于一体的先进机器人平台。该系统融合前沿技术与创新设计理念,为多领域用户提供高效、便捷的机器人操作体验,有力推动机器人技术的研究与应用。
 Details
Details小型四足机器人实验平台
- #机器人
- @仿生机器人
小型四足机器人实验平台(ET_PROs_08 系列)由 EASYTOLAB 精心打造,是一款集科研探索与教学实践于一体的创新型机器人实验设备,依托 Matlab 和 Simulink 的强大功能,为腿式机器人领域的发展注入新活力。
 Details
Details小型四旋翼无人机
- #机器人
- @空中机器人
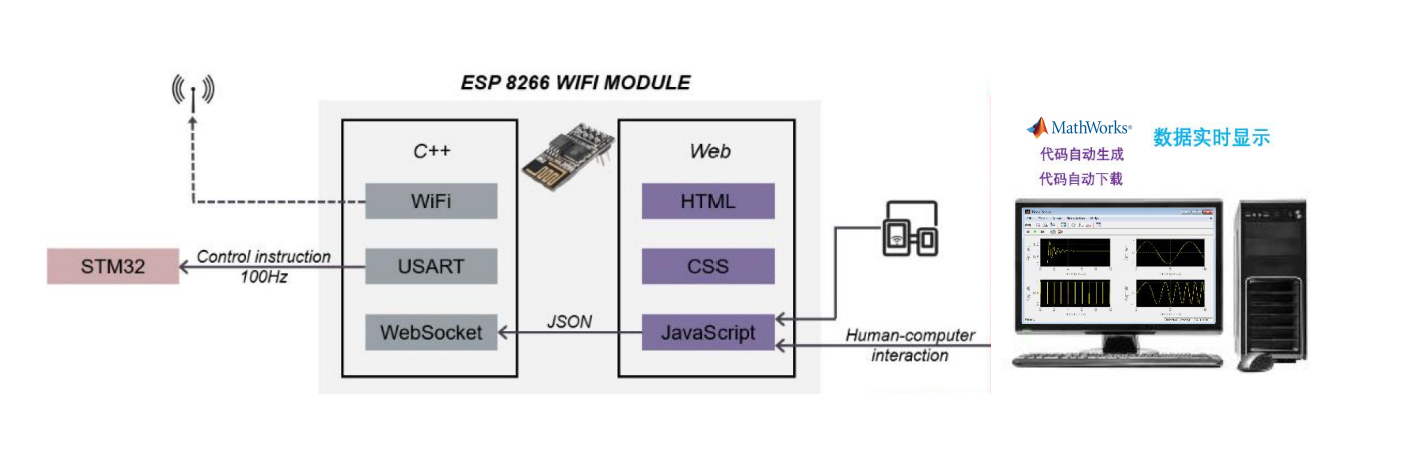
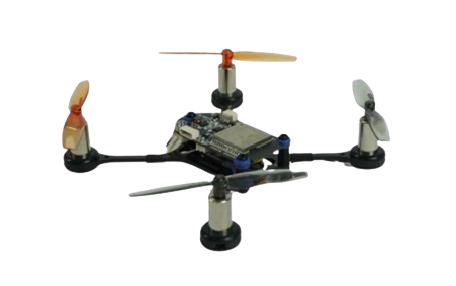
EASYTOLAB 推出的小型四旋翼无人机开发套件,是一款专为无人机开发爱好者、教育科研人员打造的创新产品,集先进硬件配置、丰富软件资源与完善配件于一体,为探索无人机技术提供了理想平台。
 Details
Details基于DSP的新能源实验平台
- #电机与电气
- @DSP与嵌入式系统
基于 DSP 的新能源实验平台(N100 系列)由 EASYTOLAB 精心打造,专为电气工程与自动化专业的本科生提供一个将理论知识与实践操作紧密结合的学习平台。和动态负载控制提供了创新性和实际应用价值极高的研究工具。
/images/cover.png) Details
Details磁悬浮实验平台(OT - ME - 102)
- #其他
磁悬浮实验平台 (OT - ME - 102) 是一款聚焦于磁悬浮系统和电磁控制技术研究的专业实验平台,在教育与科研领域有着重要价值。
 Details
DetailsMatSimBox D007 实时仿真系统
- #Matlab实时控制器
MatSimBox D007 实时仿真系统是一款功能强大、应用广泛的专业仿真工具,旨在为多个领域提供高效、精准的实时仿真解决方案,助力用户进行系统设计、性能评估、算法验证等工作。